WOLFRAM SYSTEM MODELER
PendulumWithSpringDamperSimple spring/damper/mass system |
|
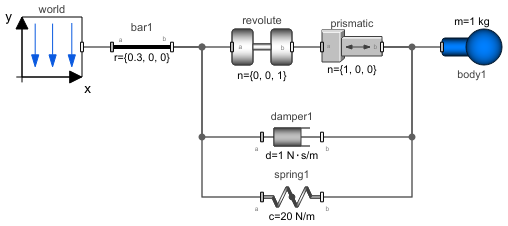
Diagram
Wolfram Language
In[1]:=
SystemModel["Modelica.Mechanics.MultiBody.Examples.Elementary.PendulumWithSpringDamper"]
Out[1]:=
Information
This information is part of the Modelica Standard Library maintained by the Modelica Association.
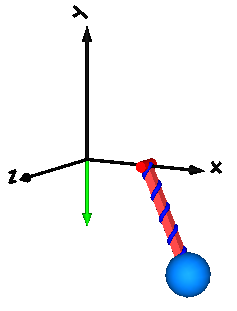
A body is attached on a revolute and prismatic joint. A 3-dim. spring and a 3-dim. damper are connected between the body and a point fixed in the world frame:
Parameters (1)
| animation |
Value: true Type: Boolean Description: = true, if animation shall be enabled |
|---|
Components (7)
| world |
Type: World Description: World coordinate system + gravity field + default animation definition |
|
|---|---|---|
| body1 |
Type: Body Description: Rigid body with mass, inertia tensor and one frame connector (12 potential states) |
|
| bar1 |
Type: FixedTranslation Description: Fixed translation of frame_b with respect to frame_a |
|
| spring1 |
Type: Spring Description: Linear translational spring with optional mass |
|
| damper1 |
Type: Damper Description: Linear (velocity dependent) damper |
|
| revolute |
Type: Revolute Description: Revolute joint (1 rotational degree-of-freedom, 2 potential states, optional axis flange) |
|
| prismatic |
Type: Prismatic Description: Prismatic joint (1 translational degree-of-freedom, 2 potential states, optional axis flange) |