WOLFRAM SYSTEM MODELER
PointGravityTwo point masses in a point gravity field |
|
Diagram
Wolfram Language
In[1]:=
SystemModel["Modelica.Mechanics.MultiBody.Examples.Elementary.PointGravity"]
Out[1]:=
Information
This information is part of the Modelica Standard Library maintained by the Modelica Association.
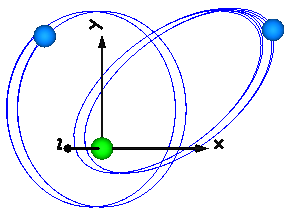
This model demonstrates a point gravity field. Two bodies are placed in the gravity field. The initial positions and velocities of these bodies are selected such that one body rotates on a circle and the other body rotates on an ellipse around the center of the point gravity field.
Components (3)
| world |
Type: World Description: World coordinate system + gravity field + default animation definition |
|
|---|---|---|
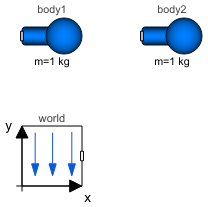
| body1 |
Type: Body Description: Rigid body with mass, inertia tensor and one frame connector (12 potential states) |
|
| body2 |
Type: Body Description: Rigid body with mass, inertia tensor and one frame connector (12 potential states) |