WOLFRAM SYSTEM MODELER
SpringDamperSystemSimple spring/damper/mass system |
|
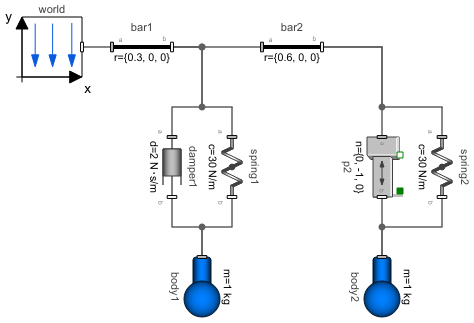
Diagram
Wolfram Language
In[1]:=
SystemModel["Modelica.Mechanics.MultiBody.Examples.Elementary.SpringDamperSystem"]
Out[1]:=
Information
This information is part of the Modelica Standard Library maintained by the Modelica Association.
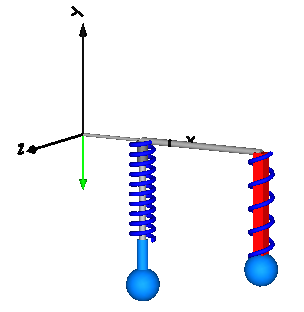
This example demonstrates:
- The animation of spring and damper components
- A body can be freely moving without any connection to a joint. In this case body coordinates are used automatically as states (whenever joints are present, it is first tried to use the generalized coordinates of the joints as states).
- If a body is freely moving, the initial position and velocity of the body can be defined with the "Initialization" menu as shown with the body "body1" in the left part (click on "Initialization").
Parameters (1)
| animation |
Value: true Type: Boolean Description: = true, if animation shall be enabled |
|---|
Components (9)
| world |
Type: World Description: World coordinate system + gravity field + default animation definition |
|
|---|---|---|
| body1 |
Type: Body Description: Rigid body with mass, inertia tensor and one frame connector (12 potential states) |
|
| bar1 |
Type: FixedTranslation Description: Fixed translation of frame_b with respect to frame_a |
|
| bar2 |
Type: FixedTranslation Description: Fixed translation of frame_b with respect to frame_a |
|
| body2 |
Type: Body Description: Rigid body with mass, inertia tensor and one frame connector (12 potential states) |
|
| p2 |
Type: Prismatic Description: Prismatic joint (1 translational degree-of-freedom, 2 potential states, optional axis flange) |
|
| spring2 |
Type: Spring Description: Linear translational spring with optional mass |
|
| spring1 |
Type: Spring Description: Linear translational spring with optional mass |
|
| damper1 |
Type: Damper Description: Linear (velocity dependent) damper |