WOLFRAM SYSTEM MODELER
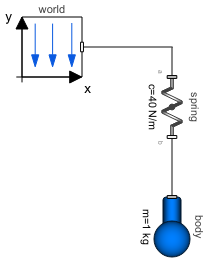
SpringWithMassPoint mass hanging on a spring |
|
Diagram
Wolfram Language
In[1]:=
SystemModel["Modelica.Mechanics.MultiBody.Examples.Elementary.SpringWithMass"]
Out[1]:=

Information
This information is part of the Modelica Standard Library maintained by the Modelica Association.
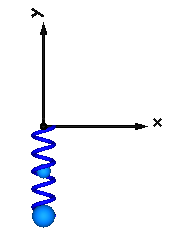
This example shows that a force component may have a mass. The 3-dimensional spring as used in this example, has an optional point mass between the two points where the spring is attached. In the animation, this point mass is represented by a small, light blue, sphere.