WOLFRAM SYSTEM MODELER
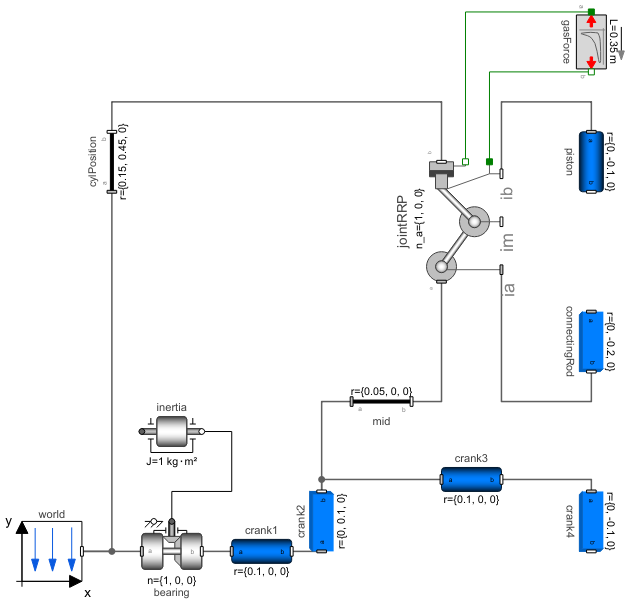
Engine1b_analyticModel of one cylinder engine with gas force and analytic loop handling |
|
Diagram
Wolfram Language
In[1]:=
SystemModel["Modelica.Mechanics.MultiBody.Examples.Loops.Engine1b_analytic"]
Out[1]:=
Information
This information is part of the Modelica Standard Library maintained by the Modelica Association.
This is the same model as Loops.Engine1b. The only difference is that the central part of the planar kinematic loop has been replaced by the assembly joint "Modelica.Mechanics.MultiBody.Joints.Assemblies.JointRRP". The advantage of using JointRRP is, that the non-linear algebraic equation of this loop is solved analytically, and not numerically as in Loops.Engine1b.
An animation of this example is shown in the figure below.
Components (13)
| world |
Type: World Description: World coordinate system + gravity field + default animation definition |
|
|---|---|---|
| piston |
Type: BodyCylinder Description: Rigid body with cylinder shape. Mass and animation properties are computed from cylinder data and density (12 potential states) |
|
| connectingRod |
Type: BodyBox Description: Rigid body with box shape. Mass and animation properties are computed from box data and density (12 potential states) |
|
| bearing |
Type: Revolute Description: Revolute joint (1 rotational degree-of-freedom, 2 potential states, optional axis flange) |
|
| inertia |
Type: Inertia Description: 1D-rotational component with inertia |
|
| crank1 |
Type: BodyCylinder Description: Rigid body with cylinder shape. Mass and animation properties are computed from cylinder data and density (12 potential states) |
|
| crank2 |
Type: BodyBox Description: Rigid body with box shape. Mass and animation properties are computed from box data and density (12 potential states) |
|
| crank3 |
Type: BodyCylinder Description: Rigid body with cylinder shape. Mass and animation properties are computed from cylinder data and density (12 potential states) |
|
| crank4 |
Type: BodyBox Description: Rigid body with box shape. Mass and animation properties are computed from box data and density (12 potential states) |
|
| mid |
Type: FixedTranslation Description: Fixed translation of frame_b with respect to frame_a |
|
| cylPosition |
Type: FixedTranslation Description: Fixed translation of frame_b with respect to frame_a |
|
| gasForce |
Type: GasForce2 Description: Rough approximation of gas force in a combustion engine's cylinder |
|
| jointRRP |
Type: JointRRP Description: Planar revolute - revolute - prismatic joint aggregation (no constraints, no potential states) |