WOLFRAM SYSTEM MODELER
LoopsExamples with kinematic loops |
|
Package Contents
|
Model of one cylinder engine |
|
|
Model of one cylinder engine with gas force and preparation for assembly joint JointRRP |
|
|
Model of one cylinder engine with gas force and analytic loop handling |
|
|
V6 engine with 6 cylinders, 6 planar loops and 1 degree-of-freedom |
|
|
V6 engine with 6 cylinders, 6 planar loops, 1 degree-of-freedom and analytic handling of kinematic loops |
|
|
One kinematic loop with four bars (with only revolute joints; 5 non-linear equations) |
|
|
One kinematic loop with four bars (with UniversalSpherical joint; 1 non-linear equation) |
|
|
One kinematic loop with four bars (with JointSSP joint; analytic solution of non-linear algebraic loop) |
|
|
Planar four bars mechanism with one kinematic loop (with RevolutePlanarLoopConstraint joint) |
|
|
Mechanism with three planar kinematic loops and one degree-of-freedom with analytic loop handling (with JointRRR joints) |
|
|
Utility classes for examples of kinematic loops |
Information
This information is part of the Modelica Standard Library maintained by the Modelica Association.
This package contains different examples to show how mechanical systems with kinematic loops can be modeled.
Content
| Model | Description |
|---|---|
| Engine1a Engine1b Engine1b_analytic |
Model of one cylinder engine (Engine1a: simple, without combustion; Engine1b: with combustion;
Engine1b_analytic: same as Engine1b but analytic loop handling)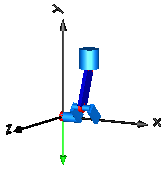
|
| EngineV6 EngineV6_analytic |
V6 engine with 6 cylinders, 6 planar loops and 1 degree-of-freedom.
Second version with analytic handling of kinematic loops and CAD data
animation.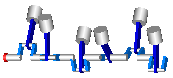

|
| Fourbar1 | One kinematic loop with four bars (with only revolute joints;
5 non-linear equations)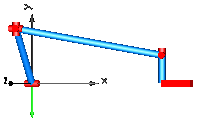
|
| Fourbar2 | One kinematic loop with four bars (with UniversalSpherical
joint; 1 non-linear equation)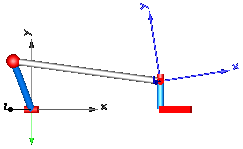
|
| Fourbar_analytic | One kinematic loop with four bars (with JointSSP joint;
analytic solution of non-linear algebraic loop)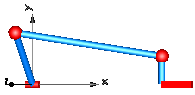
|
| PlanarFourbar | Planar four bars with one kinematic loop (with RevolutePlanarLoopConstraint joint)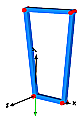
|
| PlanarLoops_analytic | Mechanism with three planar kinematic loops and one
degree-of-freedom with analytic loop handling
(with JointRRR joints)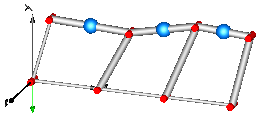
|
Wolfram Language
In[1]:=
SystemModel["Modelica.Mechanics.MultiBody.Examples.Loops"]
Out[1]:=
