WOLFRAM SYSTEM MODELER
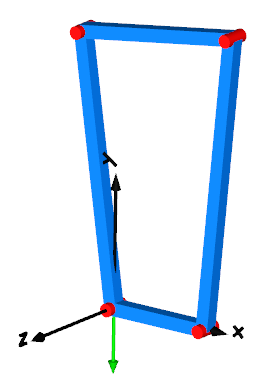
PlanarFourbarPlanar four bars mechanism with one kinematic loop (with RevolutePlanarLoopConstraint joint) |
|
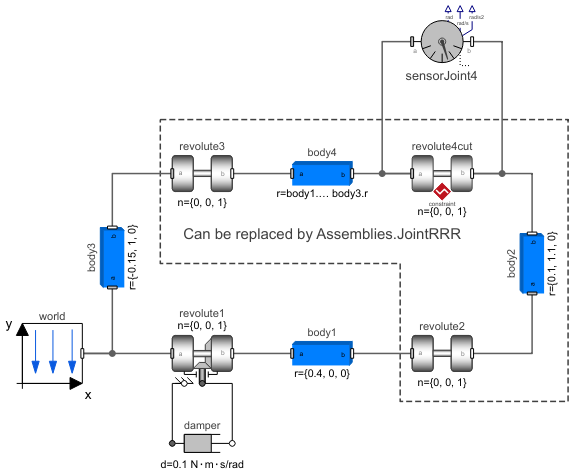
Diagram
Wolfram Language
In[1]:=
SystemModel["Modelica.Mechanics.MultiBody.Examples.Loops.PlanarFourbar"]
Out[1]:=
Information
This information is part of the Modelica Standard Library maintained by the Modelica Association.
A planar four link mechanism demonstrating possible usage of the RevolutePlanarLoopConstraint. In this planar example, all the revolute joints rotate about axes perpendicular to the x-y plane, i.e. they all are parallel to each other. To enable a unique numerical solution in such a case, one RevolutePlanarLoopConstraint has to be introduced instead of the common revolute joint.
Another option is to use the assembly joint Joints.Assemblies.JointRRR instead of a part of the mechanism, as demonstrated in the example PlanarLoops_analytic.
Components (11)
| revolute1 |
Type: Revolute Description: Revolute joint (1 rotational degree-of-freedom, 2 potential states, optional axis flange) |
|
|---|---|---|
| revolute2 |
Type: Revolute Description: Revolute joint (1 rotational degree-of-freedom, 2 potential states, optional axis flange) |
|
| revolute3 |
Type: Revolute Description: Revolute joint (1 rotational degree-of-freedom, 2 potential states, optional axis flange) |
|
| revolute4cut |
Type: RevolutePlanarLoopConstraint Description: Revolute joint that is described by 2 positional constraints for usage in a planar loop (the ambiguous cut-force perpendicular to the loop and the ambiguous cut-torques are set arbitrarily to zero) |
|
| body1 |
Type: BodyBox Description: Rigid body with box shape. Mass and animation properties are computed from box data and density (12 potential states) |
|
| body2 |
Type: BodyBox Description: Rigid body with box shape. Mass and animation properties are computed from box data and density (12 potential states) |
|
| body3 |
Type: BodyBox Description: Rigid body with box shape. Mass and animation properties are computed from box data and density (12 potential states) |
|
| body4 |
Type: BodyBox Description: Rigid body with box shape. Mass and animation properties are computed from box data and density (12 potential states) |
|
| world |
Type: World Description: World coordinate system + gravity field + default animation definition |
|
| damper |
Type: Damper Description: Linear 1D rotational damper |
|
| sensorJoint4 |
Type: RelativeSensor Description: Measure relative kinematic quantities between two frame connectors |