WOLFRAM SYSTEM MODELER
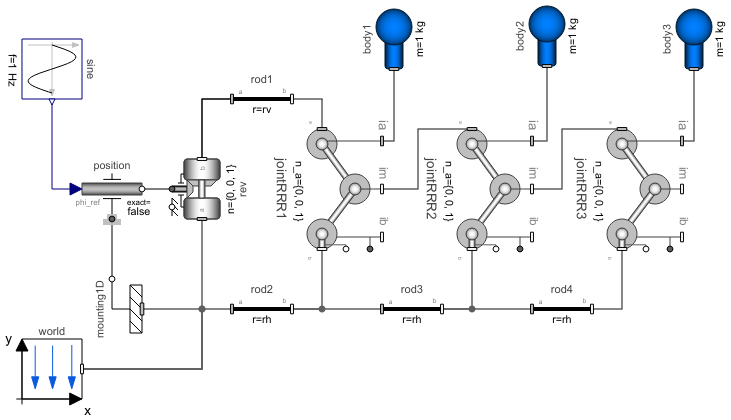
PlanarLoops_analyticMechanism with three planar kinematic loops and one degree-of-freedom with analytic loop handling (with JointRRR joints) |
|
Diagram
Wolfram Language
In[1]:=
SystemModel["Modelica.Mechanics.MultiBody.Examples.Loops.PlanarLoops_analytic"]
Out[1]:=
Information
This information is part of the Modelica Standard Library maintained by the Modelica Association.
It is demonstrated how the Modelica.Mechanics.MultiBody.Joints.Assemblies.JointRRR joint can be used to solve the non-linear equations of coupled planar loops analytically. In the mechanism below no non-linear equation occurs any more from the tool view, since these equations are solved analytically in the JointRRR joints. For more details, see MultiBody.UsersGuide.Tutorial.LoopStructures.AnalyticLoopHandling.
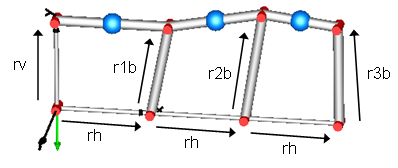
In the following figure the parameter vectors of this example are visualized in the animation view.
Parameters (8)
| rh |
Value: {0.5, 0, 0} Type: Length[3] (m) Description: Position vector from 'lower left' revolute to 'lower right' revolute joint for all the 3 loops |
|---|---|
| rv |
Value: {0, 0.5, 0} Type: Length[3] (m) Description: Position vector from 'lower left' revolute to 'upper left' revolute joint in the first loop |
| r1b |
Value: {0.1, 0.5, 0} Type: Length[3] (m) Description: Position vector from 'lower right' revolute to 'upper right' revolute joint in the first loop |
| r1a |
Value: r1b + rh - rv Type: Length[3] (m) Description: Position vector from 'upper left' revolute to 'upper right' revolute joint in the first loop |
| r2b |
Value: {0.1, 0.6, 0} Type: Length[3] (m) Description: Position vector from 'lower right' revolute to 'upper right' revolute joint in the second loop |
| r2a |
Value: r2b + rh - r1b Type: Length[3] (m) Description: Position vector from 'upper left' revolute to 'upper right' revolute joint in the second loop |
| r3b |
Value: {0, 0.55, 0} Type: Length[3] (m) Description: Position vector from 'lower right' revolute to 'upper right' revolute joint in the third loop |
| r3a |
Value: r3b + rh - r2b Type: Length[3] (m) Description: Position vector from 'upper left' revolute to 'upper right' revolute joint in the third loop |
Components (15)
| world |
Type: World Description: World coordinate system + gravity field + default animation definition |
|
|---|---|---|
| jointRRR1 |
Type: JointRRR Description: Planar revolute - revolute - revolute joint aggregation (no constraints, no potential states) |
|
| rev |
Type: Revolute Description: Revolute joint (1 rotational degree-of-freedom, 2 potential states, optional axis flange) |
|
| rod1 |
Type: FixedTranslation Description: Fixed translation of frame_b with respect to frame_a |
|
| rod2 |
Type: FixedTranslation Description: Fixed translation of frame_b with respect to frame_a |
|
| body1 |
Type: Body Description: Rigid body with mass, inertia tensor and one frame connector (12 potential states) |
|
| position |
Type: Position Description: Forced movement of a flange according to a reference angle signal |
|
| sine |
Type: Sine Description: Generate sine signal |
|
| jointRRR2 |
Type: JointRRR Description: Planar revolute - revolute - revolute joint aggregation (no constraints, no potential states) |
|
| rod3 |
Type: FixedTranslation Description: Fixed translation of frame_b with respect to frame_a |
|
| body2 |
Type: Body Description: Rigid body with mass, inertia tensor and one frame connector (12 potential states) |
|
| jointRRR3 |
Type: JointRRR Description: Planar revolute - revolute - revolute joint aggregation (no constraints, no potential states) |
|
| rod4 |
Type: FixedTranslation Description: Fixed translation of frame_b with respect to frame_a |
|
| body3 |
Type: Body Description: Rigid body with mass, inertia tensor and one frame connector (12 potential states) |
|
| mounting1D |
Type: Mounting1D Description: Propagate 1-dim. support torque to 3-dim. system (provided world.driveTrainMechanics3D=true) |