WOLFRAM SYSTEM MODELER
CylinderCylinder with rod and crank of a combustion engine |
|
Diagram
Wolfram Language
In[1]:=
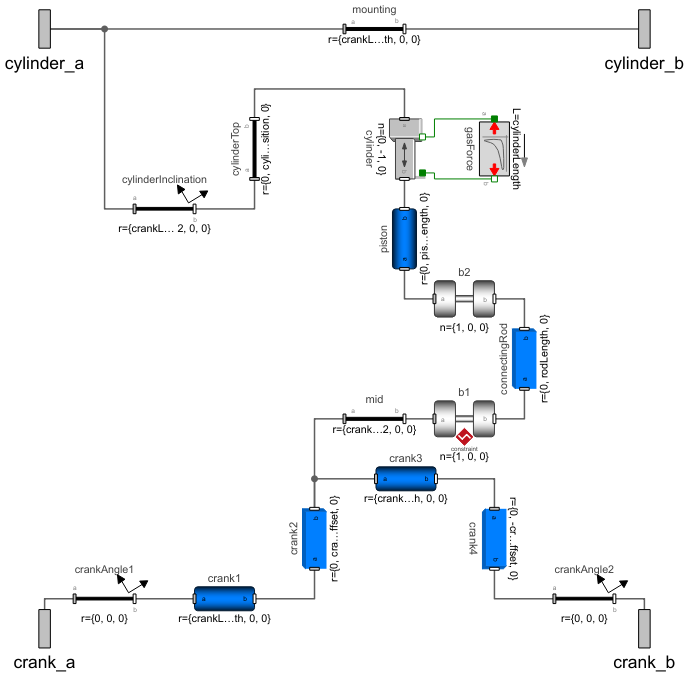
SystemModel["Modelica.Mechanics.MultiBody.Examples.Loops.Utilities.Cylinder"]
Out[1]:=
Information
This information is part of the Modelica Standard Library maintained by the Modelica Association.
Cylinder with rod and crank of a combustion engine. Used as submodel in Loops.EngineV6.
Parameters (10)
| animation |
Value: true Type: Boolean Description: = true, if animation shall be enabled |
|---|---|
| cylinderTopPosition |
Value: 0.42 Type: Length (m) Description: Length from crank shaft to end of cylinder. |
| pistonLength |
Value: 0.1 Type: Length (m) Description: Length of cylinder |
| rodLength |
Value: 0.2 Type: Length (m) Description: Length of rod |
| crankLength |
Value: 0.2 Type: Length (m) Description: Length of crank shaft in x direction |
| crankPinOffset |
Value: 0.1 Type: Length (m) Description: Offset of crank pin from center axis |
| crankPinLength |
Value: 0.1 Type: Length (m) Description: Offset of crank pin from center axis |
| cylinderInclinationAngle |
Value: 0 Type: Angle (rad) Description: Inclination of cylinder |
| crankAngleOffset |
Value: 0 Type: Angle (rad) Description: Offset for crank angle |
| cylinderLength |
Value: cylinderTopPosition - (pistonLength + rodLength - crankPinOffset) Type: Length (m) Description: Maximum length of cylinder volume |
Connectors (4)
| cylinder_a |
Type: Frame_a Description: Coordinate system fixed to the component with one cut-force and cut-torque (filled rectangular icon) |
|
|---|---|---|
| cylinder_b |
Type: Frame_a Description: Coordinate system fixed to the component with one cut-force and cut-torque (filled rectangular icon) |
|
| crank_a |
Type: Frame_a Description: Coordinate system fixed to the component with one cut-force and cut-torque (filled rectangular icon) |
|
| crank_b |
Type: Frame_a Description: Coordinate system fixed to the component with one cut-force and cut-torque (filled rectangular icon) |
Components (16)
| piston |
Type: BodyCylinder Description: Rigid body with cylinder shape. Mass and animation properties are computed from cylinder data and density (12 potential states) |
|
|---|---|---|
| connectingRod |
Type: BodyBox Description: Rigid body with box shape. Mass and animation properties are computed from box data and density (12 potential states) |
|
| b2 |
Type: Revolute Description: Revolute joint (1 rotational degree-of-freedom, 2 potential states, optional axis flange) |
|
| crank4 |
Type: BodyBox Description: Rigid body with box shape. Mass and animation properties are computed from box data and density (12 potential states) |
|
| crank3 |
Type: BodyCylinder Description: Rigid body with cylinder shape. Mass and animation properties are computed from cylinder data and density (12 potential states) |
|
| crank1 |
Type: BodyCylinder Description: Rigid body with cylinder shape. Mass and animation properties are computed from cylinder data and density (12 potential states) |
|
| crank2 |
Type: BodyBox Description: Rigid body with box shape. Mass and animation properties are computed from box data and density (12 potential states) |
|
| b1 |
Type: RevolutePlanarLoopConstraint Description: Revolute joint that is described by 2 positional constraints for usage in a planar loop (the ambiguous cut-force perpendicular to the loop and the ambiguous cut-torques are set arbitrarily to zero) |
|
| mid |
Type: FixedTranslation Description: Fixed translation of frame_b with respect to frame_a |
|
| cylinder |
Type: Prismatic Description: Prismatic joint (1 translational degree-of-freedom, 2 potential states, optional axis flange) |
|
| mounting |
Type: FixedTranslation Description: Fixed translation of frame_b with respect to frame_a |
|
| cylinderInclination |
Type: FixedRotation Description: Fixed translation followed by a fixed rotation of frame_b with respect to frame_a |
|
| crankAngle1 |
Type: FixedRotation Description: Fixed translation followed by a fixed rotation of frame_b with respect to frame_a |
|
| crankAngle2 |
Type: FixedRotation Description: Fixed translation followed by a fixed rotation of frame_b with respect to frame_a |
|
| cylinderTop |
Type: FixedTranslation Description: Fixed translation of frame_b with respect to frame_a |
|
| gasForce |
Type: GasForce2 Description: Rough approximation of gas force in a combustion engine's cylinder |
Used in Examples (1)
|
Modelica.Mechanics.MultiBody.Examples.Loops V6 engine with 6 cylinders, 6 planar loops and 1 degree-of-freedom |