WOLFRAM SYSTEM MODELER
InverseInertiaInput/output block of an inverse inertia model |
|
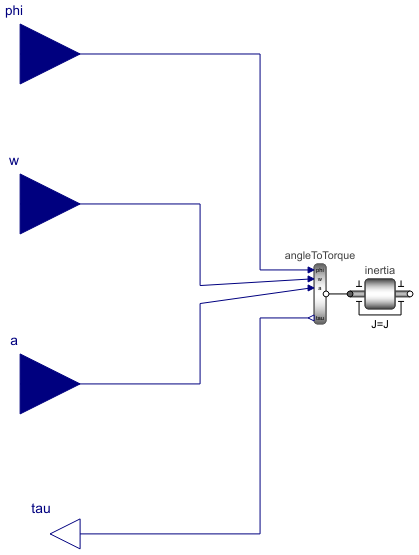
Diagram
Wolfram Language
In[1]:=
SystemModel["Modelica.Mechanics.Rotational.Examples.Utilities.InverseInertia"]
Out[1]:=
Information
This information is part of the Modelica Standard Library maintained by the Modelica Association.
A rotational component with pure signal interface which can be applied for
a FMU (Functional Mock-up Unit)
exchange.
Based on the kinematic inputs applied on a component with inertia
the output torque tau is returned.
See also
Parameters (1)
| J |
Value: 1 Type: Inertia (kg⋅m²) Description: Inertia |
|---|
Connectors (4)
| phi |
Type: RealInput Description: Angle to drive the inertia |
|
|---|---|---|
| w |
Type: RealInput Description: Speed to drive the inertia |
|
| a |
Type: RealInput Description: Acceleration to drive the inertia |
|
| tau |
Type: RealOutput Description: Torque needed to drive the flange according to phi, w, a |
Components (2)
| inertia |
Type: Inertia Description: 1D-rotational component with inertia |
|
|---|---|---|
| angleToTorque |
Type: AngleToTorqueAdaptor Description: Signal adaptor for a Rotational flange with torque as output and angle, speed, and optionally acceleration as inputs (especially useful for FMUs) |