WOLFRAM SYSTEM MODELER
AngleToTorqueAdaptorSignal adaptor for a Rotational flange with torque as output and angle, speed, and optionally acceleration as inputs (especially useful for FMUs) |
|
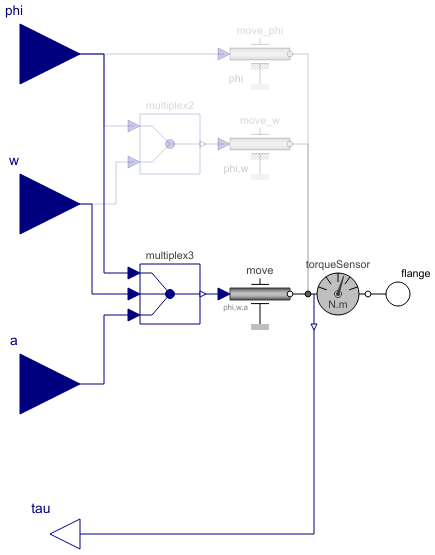
Diagram
Wolfram Language
In[1]:=
SystemModel["Modelica.Mechanics.Rotational.Components.AngleToTorqueAdaptor"]
Out[1]:=
Information
This information is part of the Modelica Standard Library maintained by the Modelica Association.
Adaptor between a flange connector and a signal representation of the flange. This component is used to provide a pure signal interface around a Rotational model and export this model in form of an input/output block, especially as FMU (Functional Mock-up Unit). Examples of the usage of this adaptor are provided in Rotational.Examples.GenerationOfFMUs. This adaptor has angle, angular velocity and angular acceleration as input signals and torque as output signal. Note, the input signals must be consistent to each other (w=der(phi), a=der(w)).
Parameters (2)
| use_w |
Value: true Type: Boolean Description: = true, enable the input connector w (angular velocity) |
|---|---|
| use_a |
Value: true Type: Boolean Description: = true, enable the input connector a (angular acceleration) |
Connectors (5)
| flange |
Type: Flange_b Description: One-dimensional rotational flange of a shaft (non-filled circle icon) |
|
|---|---|---|
| phi |
Type: RealInput Description: Angle to drive the flange |
|
| w |
Type: RealInput Description: Speed to drive the flange (w=der(phi) required) |
|
| a |
Type: RealInput Description: Angular acceleration to drive the flange (a = der(w) required) |
|
| tau |
Type: RealOutput Description: Torque needed to drive the flange according to phi, w, a |
Components (6)
| move |
Type: Move Description: Forced movement of a flange according to an angle, speed and angular acceleration signal |
|
|---|---|---|
| multiplex3 |
Type: Multiplex3 Description: Multiplexer block for three input connectors |
|
| torqueSensor |
Type: TorqueSensor Description: Ideal sensor to measure the torque between two flanges |
|
| multiplex2 |
Type: Multiplex2 Description: Multiplexer block for two input connectors |
|
| move_phi |
Type: Move_phi Description: Forced movement of a flange according to an angle signal |
|
| move_w |
Type: Move_w Description: Forced movement of a flange according to an angle and speed signal |
Used in Components (3)
|
Modelica.Mechanics.Rotational.Examples.Utilities Input/output block of an inverse inertia model |
|
|
Modelica.Mechanics.Rotational.Examples.Utilities Input/output block of a spring/damper model |
|
|
Modelica.Mechanics.Rotational.Examples.Utilities Input/output block of a spring model |