WOLFRAM SYSTEM MODELER
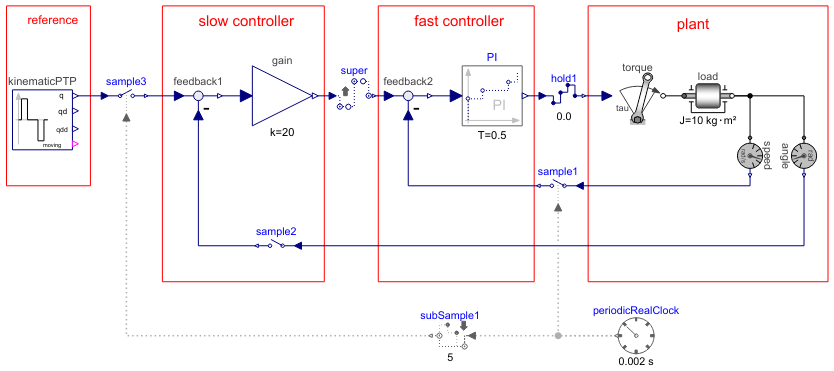
SubClockedDrive with clocked cascade controller where clocks are defined with sub-sampling and partitions with super-sampling |
|
Diagram
Wolfram Language
In[1]:=
SystemModel["Modelica_Synchronous.Examples.CascadeControlledDrive.SubClocked"]
Out[1]:=
Information
Cascade control drive with discrete-time controller where one periodic clock is defined, the second periodic clock is derived by sub-sampling of the first clock, and both clocks are associated to the corresponding controller partitions. The super-sampling factor of block "super" is derived by clock inference.
Components (16)
| load |
Type: Inertia Description: 1D-rotational component with inertia |
|
|---|---|---|
| speed |
Type: SpeedSensor Description: Ideal sensor to measure the absolute flange angular velocity |
|
| PI |
Type: PI Description: Discrete-time PI controller with clocked input and output signals (for periodic and aperiodic systems using the parameterization of the continuous PI controller) |
|
| feedback2 |
Type: Feedback Description: Output difference between commanded and feedback input |
|
| torque |
Type: Torque Description: Input signal acting as external torque on a flange |
|
| angle |
Type: AngleSensor Description: Ideal sensor to measure the absolute flange angle |
|
| kinematicPTP |
Type: KinematicPTP2 Description: Move as fast as possible from start to end position within given kinematic constraints with output signals q, qd=der(q), qdd=der(qd) |
|
| feedback1 |
Type: Feedback Description: Output difference between commanded and feedback input |
|
| gain |
Type: Gain Description: Output the product of a gain value with the input signal |
|
| sample1 |
Type: SampleClocked Description: Sample the continuous-time, Real input signal and provide it as clocked output signal. The clock is provided as input signal |
|
| sample2 |
Type: Sample Description: Sample the continuous-time, Real input signal and provide it as clocked output signal (clock is inferred) |
|
| hold1 |
Type: Hold Description: Hold the clocked, Real input signal and provide it as continuous-time output signal (zero order hold) |
|
| sample3 |
Type: SampleClocked Description: Sample the continuous-time, Real input signal and provide it as clocked output signal. The clock is provided as input signal |
|
| super |
Type: SuperSample Description: Super-sample the clocked Real input signal and provide it as clocked output signal |
|
| subSample1 |
Type: SubSample Description: Sub-sample the input clock and provide it as output clock |
|
| periodicRealClock |
Type: PeriodicRealClock Description: Generates a periodic clock signal with a period defined by a Real number |