WOLFRAM SYSTEM MODELER
CounterSpinWheel with counter-spin and dry-friction law |
|
Diagram

Wolfram Language
In[1]:=
SystemModel["PlanarMechanics.Examples.CounterSpin"]
Out[1]:=
Information
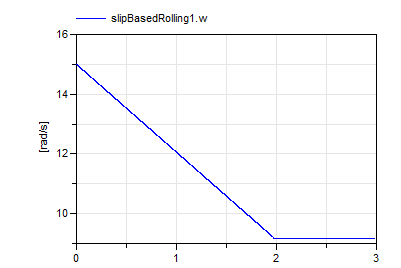
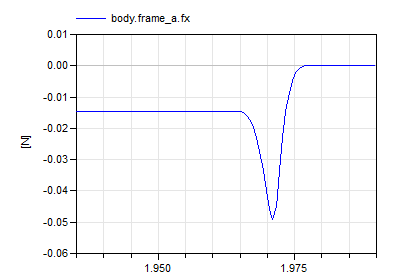
The model contains a large local stiffness before 2 s.
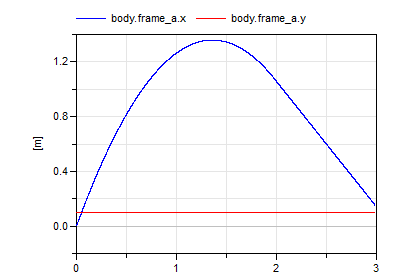
Selected continuous time states:
- body.r[1]
- body.v[1]
- slipBasedRolling.phi
- slipBasedRolling.w
Components (3)
| body |
Type: Body Description: Body component with mass and inertia |
|
|---|---|---|
| planarWorld |
Type: PlanarWorld Description: Planar world coordinate system + gravity field + default animation definition |
|
| slipBasedRolling |
Type: DryFrictionBasedRolling Description: A joint representing a wheel with slip-based rolling (dry friction law) on the x-axis |
Revisions
 Developed 2010 at the DLR Institute of System Dynamics and Control
Developed 2010 at the DLR Institute of System Dynamics and Control