WOLFRAM SYSTEM MODELER
DefectBearingComparison of a defect and regular bearing |
|
Diagram
Wolfram Language
In[1]:=
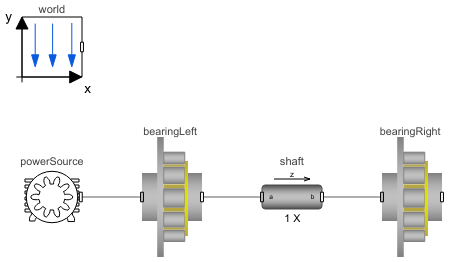
SystemModel["RotatingMachinery.Examples.BearingAnalysis.DefectBearing"]
Out[1]:=
Information
Study of Defect Bearing Roller Forces
This example shows how to model a bearing defect and how it is illustrated in animations.
The example compares two TIMKEN NU 313 EJ bearings connected to a shaft, one regular and one with a defect. The system is put in motion using a powerSource that applies a torque to the system.
To avoid having to model the geometry of the damage, a corresponding force is estimated. The force exerted by a defect can be estimated using the formula:
Fdefect = kz * Δdefect ^ (1.125) ,
where kz depends on the geometry and elasticity of the bearing and it is set to 2.711 E9 N/m for the TIMKEN NU 313 EJ. Δdefect represents the size of the defect. For instance, a defect of 0.001 mm in size would result in
2.711 E9 * 0.000001 ^ (1.125) = 482 N
In this example, the defect applies a force (500 N) at the 12 o'clock point on the rollers.
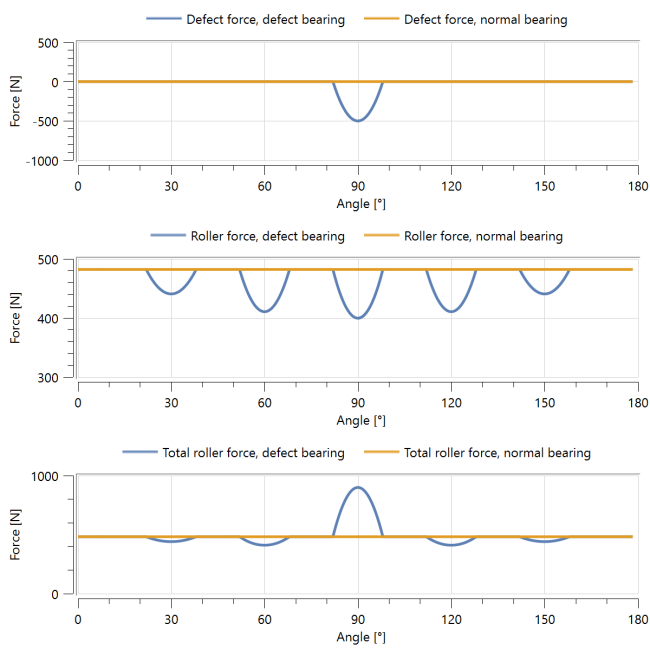
Figure 1: Roller forces.
Figure 1 illustrates the relationship between defect, roller and total forces vs. angular position on the first rollers (marked by blue arrows) in both bearings. The top graph shows the applied defect forces, while the middle graph displays the roller forces. The force on the roller with the defect is lower than the force on the regular roller. The bottom graph shows that the total forces (rollerForce + defect force) represented by blue arrows in Figure 2 are greater when the roller coincides with the defect (as shown by the red arrow in the animation).
Please note that, in reality, it is not possible to measure the roller forces as computed in the Rotating Machinery library.
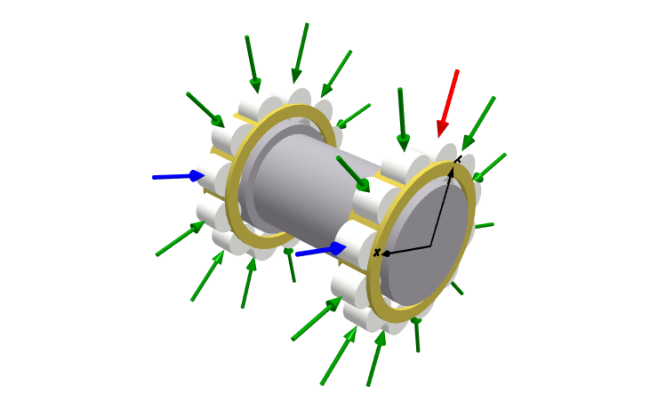 Figure 2: Animated roller forces; red arrow shows the force from the defect.
Figure 2: Animated roller forces; red arrow shows the force from the defect.
For more details on bearing analysis, see this blog post.
Components (5)
| bearingRight |
Type: TIMKEN_NU_313_EJ Description: Roller bearing parameterized with values corresponding to TIMKEN NU313EJ |
|
|---|---|---|
| world |
Type: World Description: World coordinate system + gravity field + default animation definition |
|
| bearingLeft |
Type: TIMKEN_NU_313_EJ Description: Roller bearing parameterized with values corresponding to TIMKEN NU313EJ |
|
| shaft |
Type: CylindricalBeam Description: Class with a flexible cylindrical beam |
|
| powerSource |
Type: Motor Description: Class for applying a torque to generate a desired angular velocity |