WOLFRAM SYSTEM MODELER
CantileverBeamStudy of a cantilever beam |
|
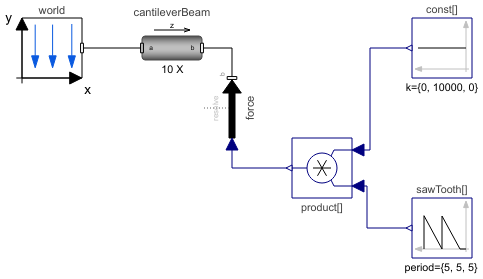
Diagram
Wolfram Language
In[1]:=
SystemModel["RotatingMachinery.Examples.Shafts.CantileverBeam"]
Out[1]:=
Information
Study of Cantilever Beam
Cantilever beams are a widely used mechanical structure in various applications, from construction to machinery. This example shows how to model and study a cantilever beam, as shown in Figure 1.
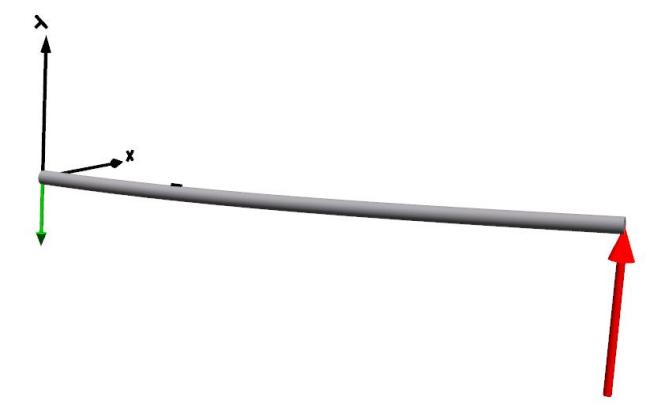
Figure 1: Cantilever beam and applied force.
A sawtooth-shaped input force is applied in the y direction at the end of the cantilever beam; see Figure 2.
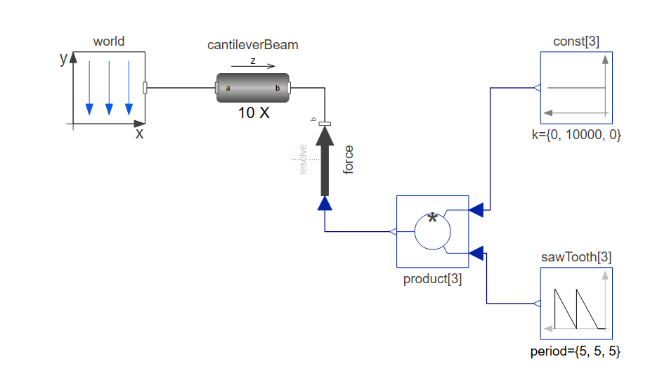
Figure 2: Cantilever beam and applied force.
The cantilever beam is divided into 10 elements (n=10) and with the material properties of steel, as shown in Figure 3.
Figure 3: Cantilever beam parameters tab.
The load increases from 0 to 10000 N in 5 seconds and is then rapidly removed. Figure 4 shows the deflection at different sections of the beam.
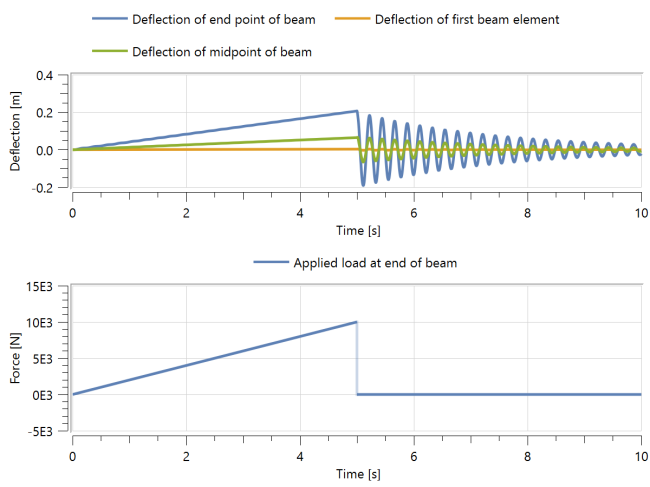
Figure 4: Applied force and vertical tip deflections.
Maximum deflection at 5 seconds is 0.206478 m. This is at the higher end of material damping for steel.
The Rayleigh proportional damping used in the beam modeling as follows
C = λK,
where λ, alpha, is the coefficient, determines the damping level.
To evaluate the accuracy of the eigenfrequency value, let the damping be very low, i.e. 1/10000. Figure 5 shows the FFT and shows that the eigenfrequency is at 4.59 Hz:
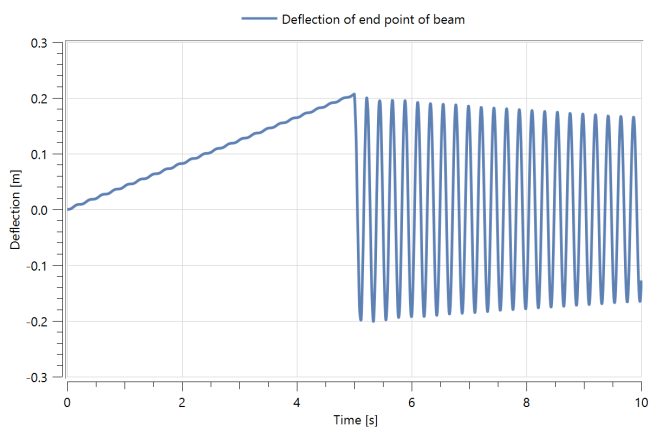
Figure 5: Tip deflections.
Figure 5 shows the FFT and shows that the eigenfrequency is at 4.59 Hz
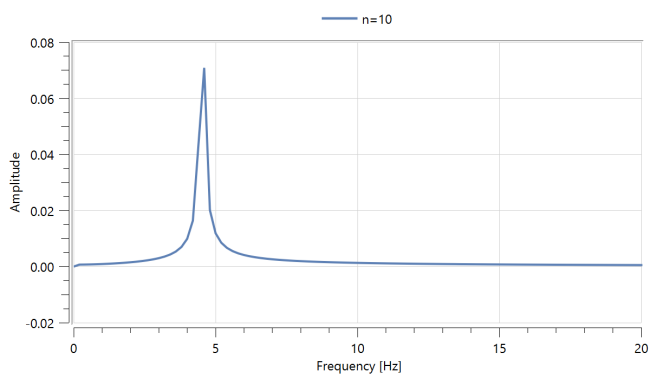
Figure 6: Frequency content of the tip deflections.
The first eigenfrequency of a cantilever beam can be calculated:
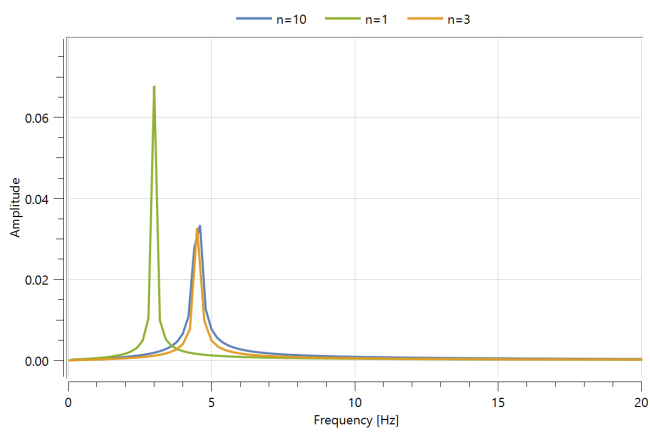
Figure 7: Frequency content of the tip deflections.
Thus, the value obtained from the simulation is 1.7% higher than the theoretical value. This difference is due to the number of beam segments used. To increase the fidelity more segments should be used, but if performance is important, they should be reduced. Note, however, that using too few elements might result in large errors, as illustrated in Figure 6.
Components (6)
| world |
Type: World Description: World coordinate system + gravity field + default animation definition |
|
|---|---|---|
| force |
Type: WorldForce Description: Force applied on the beam |
|
| const |
Type: Constant[3] Description: Generate constant signal of type Real |
|
| cantileverBeam |
Type: CylindricalBeam Description: Class with a flexible cylindrical beam |
|
| product |
Type: Product[3] Description: Output product of the two inputs |
|
| sawTooth |
Type: SawTooth[3] Description: Generate saw tooth signal |