WOLFRAM SYSTEM MODELER
PlanetWheelPlanet wheel to be used in PlanetaryGears |
|
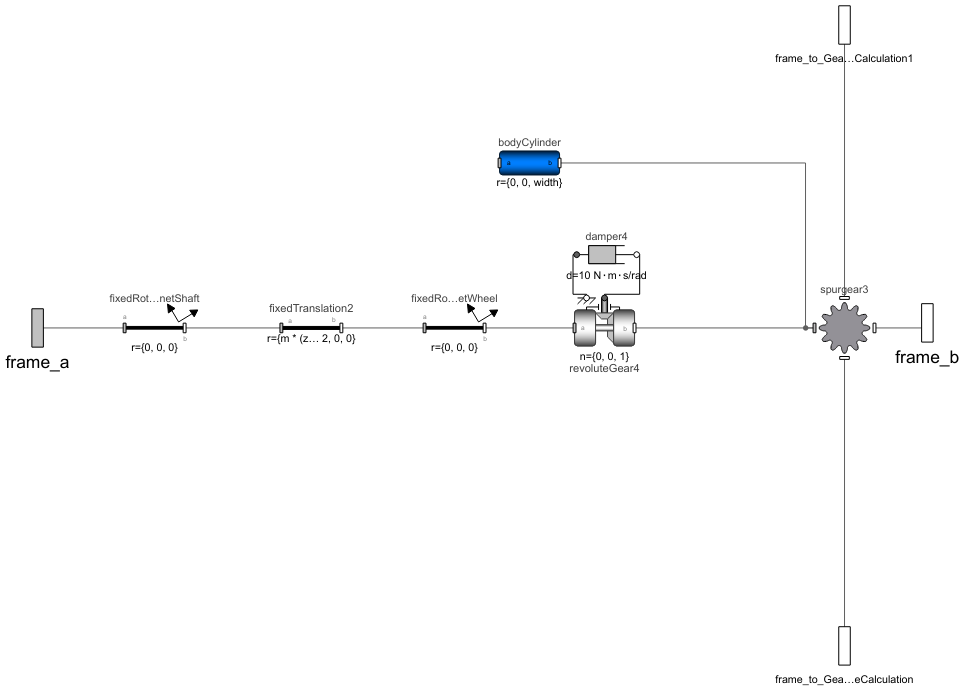
Diagram
Wolfram Language
In[1]:=
SystemModel["RotatingMachinery.Gears.PlanetaryGears.PlanetWheel"]
Out[1]:=
Information
Planet Wheel
A planetary gear normally has three or more planet wheels, [1–3]. Preferably, they are equally distributed around the sun wheel.
The planet shaft has a rotational damper to include losses but also to simplify for the numerical solver.
The planet wheel has a mass that is calculated from the bodyCylinder component.
The following graphic shows the definition of the initial angles.
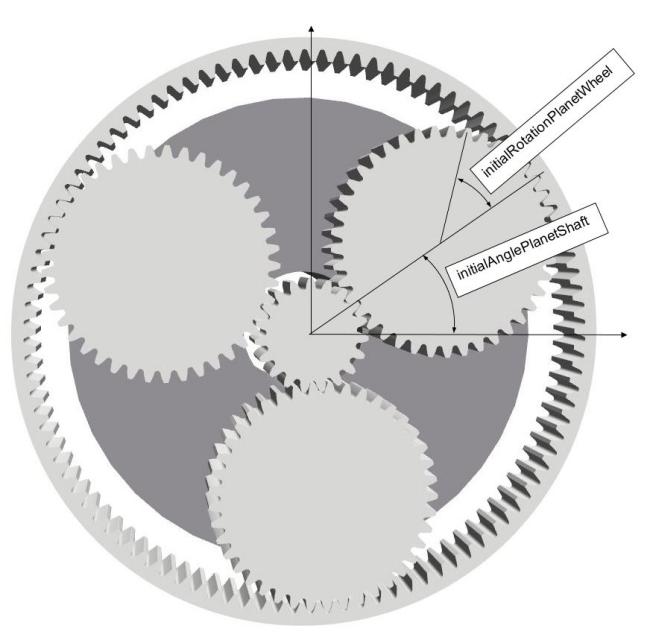
Figure 1: Planet wheel.
References
[1] Dahl, M., H. Wettergren, and H. Tidefelt. "Modelica Spur Gears with Hertzian Contact Forces." Proceedings of the 12th International Modelica Conference, Prague, Czech Republic, May 15-17, 2017. Linköping Electronic Conference Proceedings 132, no. 82 (2017): 755-763. http://dx.doi.org/10.3384/ecp17132755.
[2] Van der Lunden, F. L. J. and P. H. Vazques de Souza Silva. "Modelling and Simulating the Efficiency and Elasticity of Gearboxes." Proceedings of the 7th International Modelica Conference, Como; Italy, Sep 20-22, 2009. Linköping Electronic Conference Proceedings 43, no. 29 (2009): 270-277. http://dx.doi.org/10.3384/ecp09430052.
[3] Kosenko, I. and I. Gusev. "Implementation of the Spur Involute Gear Model on Modelica." Proceedings of the 8th International Modelica Conference, Dresden; Germany, Mar 20-22, 2011. Linköping Electronic Conference Proceedings 63, no. 35 (2011): 315-328. http://dx.doi.org/10.3384/ecp11063315.
Parameters (7)
| m |
Type: Module (m) Description: Gear module |
|---|---|
| width |
Type: Length (m) Description: Width of gearwheel |
| zs |
Type: Integer Description: Number of teeth for sunwheel |
| zp |
Type: Integer Description: Number of teeth for planetwheel |
| xp |
Value: 0 Type: Real Description: Profile shift for planetwheel |
| initialAnglePlanetShaft |
Type: Angle_deg (°) Description: Planet shaft initial angle of rotation |
| initialRotationPlanetWheel |
Type: Angle_deg (°) Description: Planet wheel initial angle of rotation |
Connectors (4)
| frame_a |
Type: Frame_a Description: Coordinate system fixed to the component with one cut-force and cut-torque (filled rectangular icon) |
|
|---|---|---|
| frame_to_GearForceCalculation |
Type: Frame_b Description: Coordinate system fixed to the component with one cut-force and cut-torque (non-filled rectangular icon) |
|
| frame_to_GearForceCalculation1 |
Type: Frame_b Description: Coordinate system fixed to the component with one cut-force and cut-torque (non-filled rectangular icon) |
|
| frame_b |
Type: Frame_b Description: Coordinate system fixed to the component with one cut-force and cut-torque (non-filled rectangular icon) |
Components (7)
| spurgear3 |
Type: SpurGear Description: Spur gear with mass, rotations and visualization |
|
|---|---|---|
| revoluteGear4 |
Type: Revolute Description: Revolute joint (1 rotational degree-of-freedom, 2 potential states, optional axis flange) |
|
| damper4 |
Type: Damper Description: Linear 1D rotational damper |
|
| fixedRotationPlanetWheel |
Type: FixedRotation Description: Fixed translation followed by a fixed rotation of frame_b with respect to frame_a |
|
| fixedRotationPlanetShaft |
Type: FixedRotation Description: Fixed translation followed by a fixed rotation of frame_b with respect to frame_a |
|
| fixedTranslation2 |
Type: FixedTranslation Description: Fixed translation of frame_b with respect to frame_a |
|
| bodyCylinder |
Type: BodyCylinder Description: Rigid body with cylinder shape. Mass and animation properties are computed from cylinder data and density (12 potential states) |
Used in Components (1)
|
RotatingMachinery.Gears.PlanetaryGears Class containing a basic planetary gear model |