WOLFRAM SYSTEM MODELER
AutopilotTurbofanAutopilot for passenger aircraft with turbofan propulsion |
|
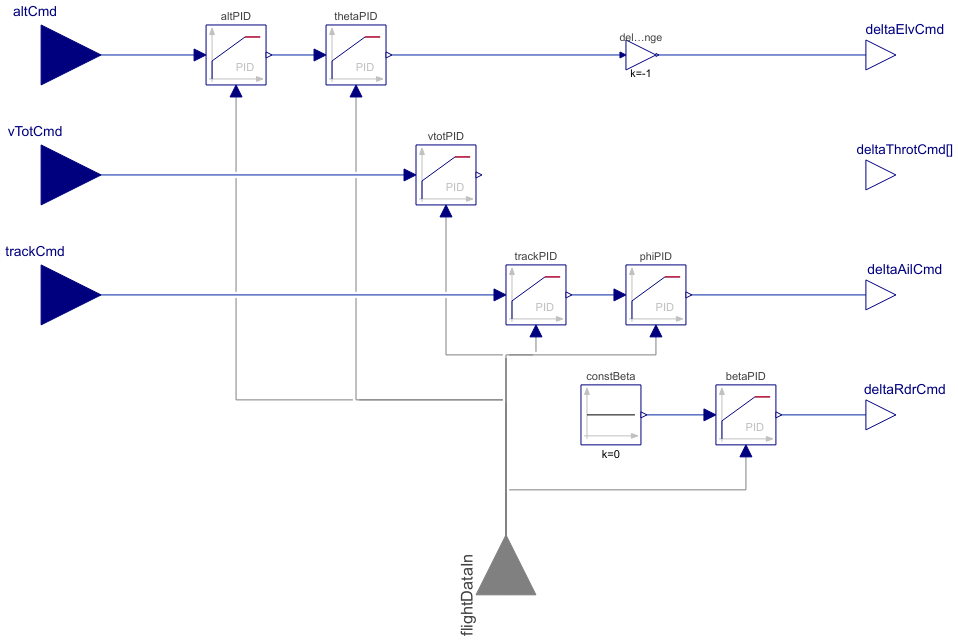
Diagram
Wolfram Language
In[1]:=
SystemModel["Aircraft.ControlSystems.Autopilots.AutopilotTurbofan"]
Out[1]:=
Information
This autopilot model extends the AutopilotBase model and is adjusted to work with aircraft with turbofan engines.
Parameters (25)
| nEng |
Value: 1 Type: Integer Description: Number of engines to control |
|---|---|
| elvControl |
Value: true Type: Boolean Description: true, if elevator is controlled |
| throtControl |
Value: true Type: Boolean Description: true, if throttle is controlled |
| ailControl |
Value: true Type: Boolean Description: true, if ailerons are controlled |
| rdrControl |
Value: true Type: Boolean Description: true, if rudder is controlled |
| maxPhi |
Value: 0.349065850398866 Type: Angle (rad) Description: Maximum roll angle |
| maxTheta |
Value: 0.349065850398866 Type: Angle (rad) Description: Maximum pitch angle |
| altPIDk |
Value: 0.0075 Type: Real Description: Altitude PID Gain |
| altPIDTi |
Value: 50 Type: Time (s) Description: Altitude PID Integrator Block |
| altPIDTd |
Value: 5 Type: Time (s) Description: Altitude PID Derivative Block |
| thetaPIDk |
Value: 0.5 Type: Real Description: Theta PID Gain |
| thetaPIDTi |
Value: 15 Type: Time (s) Description: Theta PID Integrator Block |
| thetaPIDTd |
Value: 0.5 Type: Time (s) Description: Theta PID Derivative Block |
| vtotPIDk |
Value: 2 Type: Real Description: Velocity PID Gain |
| vtotPIDTi |
Value: 2 Type: Time (s) Description: Velocity PID Integrator Block |
| vtotPIDTd |
Value: 0.25 Type: Time (s) Description: Velocity PID Derivative Block |
| trackPIDk |
Value: 2 Type: Real Description: Track PID Gain |
| trackPIDTi |
Value: 100 Type: Time (s) Description: Track PID Integrator Block |
| trackPIDTd |
Value: 5 Type: Time (s) Description: Track PID Derivative Block |
| phiPIDk |
Value: 0.75 Type: Real Description: Phi PID Gain |
| phiPIDTi |
Value: 20 Type: Time (s) Description: Phi PID Integrator Block |
| phiPIDTd |
Value: 2 Type: Time (s) Description: Phi PID Derivative Block |
| betaPIDk |
Value: 1 Type: Real Description: Beta PID Gain |
| betaPIDTi |
Value: 2 Type: Time (s) Description: Beta PID Integrator Block |
| betaPIDTd |
Value: 0.75 Type: Time (s) Description: Beta PID Derivative Block |
Connectors (8)
| deltaElvCmd |
Type: RealOutput Description: Elevator deflection command |
|
|---|---|---|
| deltaThrotCmd |
Type: RealOutput[nEng] Description: Throttle position command |
|
| altCmd |
Type: RealInput Description: Altitude command |
|
| vTotCmd |
Type: RealInput Description: Total velocity command |
|
| deltaRdrCmd |
Type: RealOutput Description: Rudder deflection command |
|
| deltaAilCmd |
Type: RealOutput Description: Aileron deflection command |
|
| trackCmd |
Type: RealInput Description: Track command |
|
| flightDataIn |
Type: FlightDataIn Description: Flight data input |
Components (8)
| altPID |
Type: LimPID Description: PID controller from altitude command to pitch angle (theta) command |
|
|---|---|---|
| vtotPID |
Type: LimPID Description: PID controller from total velocity command to throttle position command |
|
| trackPID |
Type: LimPID Description: PID controller from track angle command to roll angle (phi) command |
|
| betaPID |
Type: LimPID Description: PID controller from sideslip angle command to rudder deflection command |
|
| phiPID |
Type: LimPID Description: PID controller from roll angle (phi) command to aileron deflection command |
|
| thetaPID |
Type: LimPID Description: PID controller from pitch angle (theta) command to elevator deflection command |
|
| constBeta |
Type: Constant Description: Constant 0 signal to Beta PID setpoint input |
|
| deltaElvSignChange |
Type: Gain Description: Sign change for elevator deflection command |
Used in Examples (3)
|
Aircraft.Examples Comparison of the performance of Boeing 737-800 with known and estimated mass properties |
|
|
Aircraft.Examples Example for demonstrating the linearized state space modeling environment |
|
|
Aircraft.Examples Example of flying an aircraft with custom propulsion and engine failure |