WOLFRAM SYSTEM MODELER
ReferenceTrajectoryDraws the reference 3D trajectory as a parametric curve |
|
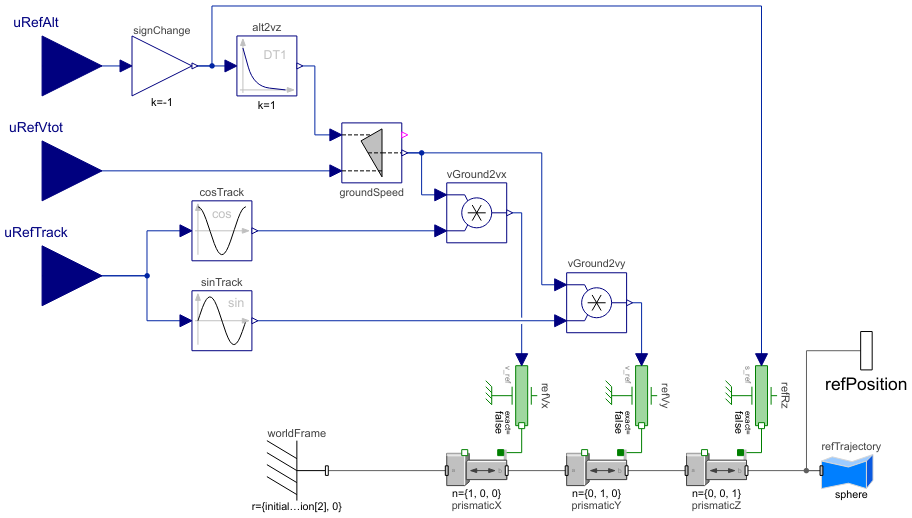
Diagram
Wolfram Language
In[1]:=
SystemModel["Aircraft.Physical.AuxiliaryObjects.ReferenceTrajectory"]
Out[1]:=
Information
This model visualizes a reference flight trajectory exactly according to the input signals of reference altitude (uRefAlt), reference total velocity (uRefVtot) and reference track angle (uRefTrack) starting from the initial value of the reference altitude and the given initial lateral position in the world frame x-y plane (initialLatPosition). If the absolute value of the first time derivative of the reference altitude, exceeds the reference total velocity at any time, the total velocity is increased to the absolute value of the first time derivative of the reference altitude and a corresponding warning is given.
Parameters (2)
| initialLatPosition |
Value: Type: Position[2] (m) Description: Initial lateral position of the aircraft (x and y coordinates in world frame) |
|---|---|
| sphereDiameter |
Value: 5 Type: Diameter (m) Description: Diameter of sphere |
Connectors (4)
Components (15)
| prismaticX |
Type: Prismatic Description: Joint allowing movement along world frame x-axis |
|
|---|---|---|
| prismaticY |
Type: Prismatic Description: Joint allowing movement along world frame y-axis |
|
| prismaticZ |
Type: Prismatic Description: Joint allowing movement along world frame z-axis |
|
| refVx |
Type: Speed Description: Reference world frame x-component of total velocity |
|
| refRz |
Type: Position Description: Reference world frame z-component of position |
|
| signChange |
Type: Gain Description: Converts positive altitude into negative world frame z-coordinate |
|
| alt2vz |
Type: Derivative Description: Converts reference altitude signal into reference vertical velocity |
|
| groundSpeed |
Type: Pythagoras Description: Solves ground speed from total velocity and vertical velocity |
|
| sinTrack |
Type: Sin Description: Sine of reference track angle |
|
| cosTrack |
Type: Cos Description: Cosine of reference track angle |
|
| refVy |
Type: Speed Description: Reference world frame y-component of total velocity |
|
| vGround2vy |
Type: Product Description: Solves velocity world frame y-component |
|
| vGround2vx |
Type: Product Description: Solves velocity world frame x-component |
|
| worldFrame |
Type: Fixed Description: Fixed frame to world origin |
|
| refTrajectory |
Type: FixedShape Description: Visualizing an elementary shape with dynamically varying shape attributes (has one frame connector) |
Used in Examples (1)
|
Aircraft.Examples Example of tuning autopilot PID controllers |