WOLFRAM SYSTEM MODELER
ElectricEngineElectric engine: unparameterized |
|
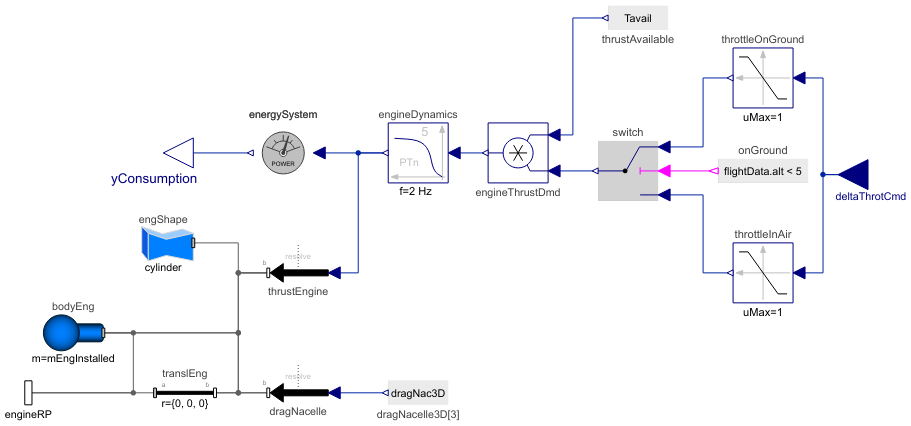
Diagram
Wolfram Language
In[1]:=

SystemModel["Aircraft.Physical.FixedWing.Parts.Propulsions.Engines.ElectricEngines.ElectricEngine"]
Out[1]:=
Information
This electric engine model extends the EngineBase model and models the thrust and mass (if weight estimation method is used) of an electric engine.
Parameters
The required parameters for the electric engine model are listed in the Propulsion tab, as shown in Figure 1.
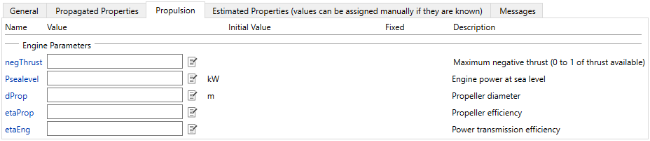
Figure 1: Required input parameters for electric engine model.
Should the value of any of the estimated properties listed in the Estimated Properties parameter tab be known (such as engine mass), the equations can be bypassed by entering the known value directly to the respective parameter input field.
The remaining parameters listed in the Propagated parameters tab are propagated from the AircraftBase as the propulsion system is compiled in ElectricPropulsion, and thus they can and should be left unchanged.
Thrust Available
The thrust available (Tavail) for electric engines is solved through dividing the power available (Pavail) by the total velocity (vtot), and the factors for representing the propeller (ηprop) and power transmission efficiencies (ηmech) are also added, thus
![]() .
.
For electric engines, the power available is invariable with flight conditions, and thus it always equals the engine power at sea level (P0).
Energy Consumption
The calculations for energy consumption are performed in the energySystem component.
Drag
The electric engine is considered to be installed completely inside the fuselage, and the drag due to propeller is omitted. Thus, the electric engine model currently has no drag.
Mass
If the weight estimation method is used and no engine mass is entered by the user, the engine mass is solved by using an empirical relationship based on the given P0 parameter value, as presented by Erä-Esko [1]
![]() .
.
The mass of the propeller is then added on top of this estimated engine mass.
The engine moments of inertia are estimated to be insignificantly small, and thus a default value of 0.001 kg/m2 is used, which, however, can be overwritten by entering another value in the Estimated Properties parameter tab.
References
[1] Erä-Esko, N. (2022). "Development and Use of System Modeler 6DOF Flight Mechanics Model in Aircraft Conceptual Design."
Available at: modelica://Aircraft/Resources/Documents/EraeEskoThesis.pdf.
Parameters (19)
| weightEst |
Type: Boolean Description: true, if weight estimation method is used for masses, center of mass location and inertia tensor |
|---|---|
| bWing |
Type: Length (m) Description: Main wing span |
| SrefWing |
Type: Area (m²) Description: Main wing reference area |
| CADshapes |
Type: Boolean Description: true, if external CAD files are used for animation |
| negThrust |
Type: Real Description: Maximum negative thrust (0 to 1 of thrust available) |
| EnergySystem |
Replaceable Class Redeclared as: ElectricSystem Description: Consumed electricity of electrical engines |
| rho0 |
Type: Density (kg/m³) Description: Air density at sea-level |
| Psealevel |
Type: Power (W) Description: Engine power at sea level |
| dProp |
Type: Length (m) Description: Propeller diameter |
| etaProp |
Type: Real Description: Propeller efficiency |
| etaEng |
Type: Real Description: Power transmission efficiency |
| mProp |
Value: 0 Type: Mass (kg) Description: Propeller mass |
| mEngDry |
Value: Psealevel * W2kg / 3200 Type: Mass (kg) Description: Engine dry mass |
| mEngInstalled |
Value: mEngDry + mProp Type: Mass (kg) Description: Installed engine mass |
| xEngCM |
Value: 0 Type: Length (m) Description: Engine center of mass x-coordinate w.r.t. engine rear end |
| IxxEng |
Value: 0.001 Type: MomentOfInertia (kg⋅m²) Description: Engine roll moment of inertia |
| IyyEng |
Value: 0.001 Type: MomentOfInertia (kg⋅m²) Description: Engine pitch moment of inertia |
| IzzEng |
Value: 0.001 Type: MomentOfInertia (kg⋅m²) Description: Engine yaw moment of inertia |
| Tstatic |
Value: (Modelica.Constants.pi / 2 * rho0 * dProp ^ 2 * Psealevel ^ 2) ^ (1 / 3) Type: Force (N) Description: Static thrust of one engine at sea level |
Inputs (1)
| flightData |
Type: FlightData Description: Global flight data variables |
|---|
Connectors (3)
| deltaThrotCmd |
Type: RealInput Description: Throttle position command |
|
|---|---|---|
| engineRP |
Type: Frame_b Description: Connector to engine reference point |
|
| yConsumption |
Type: RealOutput Description: Consumed electric energy or fuel in an engine |
Components (15)
| flightData |
Type: FlightData Description: Global flight data variables |
|
|---|---|---|
| energySystem |
Type: ElectricSystem Description: Model to calculate the consumed electric energy or fuel in an engine |
|
| thrustEngine |
Type: WorldForce Description: Engine net thrust |
|
| engShape |
Type: FixedShape Description: Engine visualization |
|
| thrustAvailable |
Type: RealExpression Description: Thrust available of one engine |
|
| engineThrustDmd |
Type: Product Description: Thrust demand for one engine |
|
| engineDynamics |
Type: CriticalDamping Description: Simplified model of the engine dynamics |
|
| throttleOnGround |
Type: Limiter Description: Limits the throttle from maximum negative thrust to 1 once on the ground |
|
| dragNacelle3D |
Type: RealExpression[3] Description: Drag due to one nacelle |
|
| dragNacelle |
Type: WorldForce Description: Drag of nacelle |
|
| translEng |
Type: FixedTranslation Description: Translation from engine rear end to the point where thrust and drag are acting on (currently no translation) |
|
| bodyEng |
Type: Body Description: Mass and inertia of engine |
|
| switch |
Type: Switch Description: Switch between two Real signals |
|
| throttleInAir |
Type: Limiter Description: Limits the throttle from 0 to 1 once airborne |
|
| onGround |
Type: BooleanExpression Description: Boolean expression for indicating aircraft being on ground |
Extended by (1)
|
Aircraft.Physical.FixedWing.Parts.Propulsions.Engines.ElectricEngines Electric engine: Pipistrel PEM 60MVLC |