WOLFRAM SYSTEM MODELER
VisualizationPointDraws the reference 3D trajectory as a parametric curve |
|
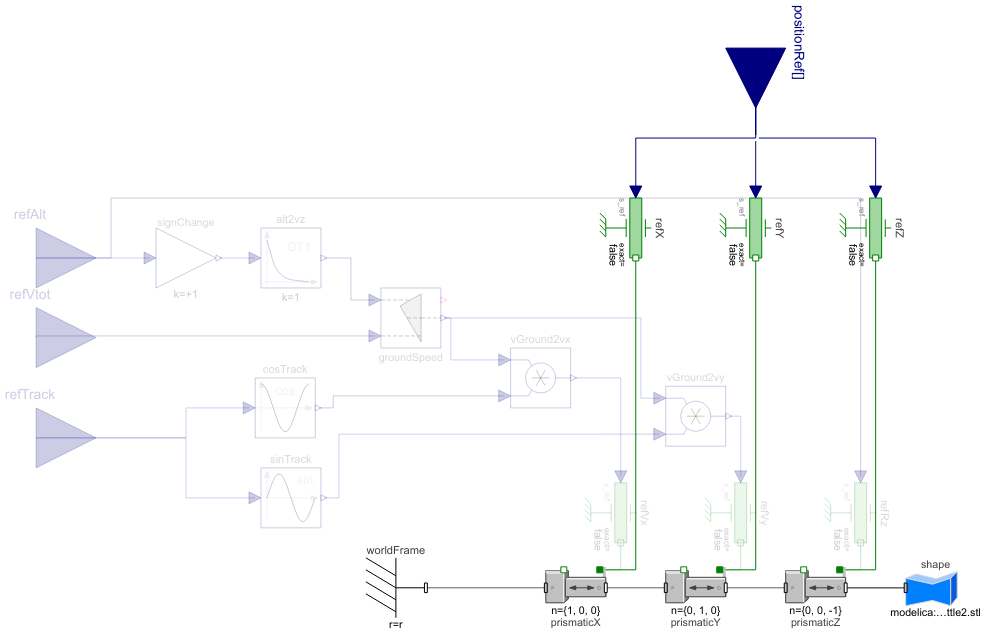
Diagram
Wolfram Language
In[1]:=
SystemModel["Aircraft.Utilities.Animation.VisualizationPoint"]
Out[1]:=
Information
This model visualizes a reference trajectory according to the input signals. There are two input types: one set includes reference altitude (uRefAlt), reference total velocity (uRefVtot), and reference track angle (uRefTrack), while the other set accepts a position vector indicating x, y, and z positions. In both cases, the trajectory originates from an initial position, which is set to {0, 0, 0} by default and can be adjusted using the parameter r. In the first case, If the absolute value of the first time derivative of the reference altitude, exceeds the reference total velocity at any time, the total velocity is increased to the absolute value of the first time derivative of the reference altitude and a corresponding warning is given. Users can customize the size of the CAD shape according to the vehicle's dimensions by modifying the uniformSizeScale parameter.
Parameters (3)
| coordination |
Value: Coordination.xyz Type: Coordination Description: "xyz" for position coordinate and "altVelAng" for altitude, velocity, and track angle input |
|---|---|
| uniformSizeScale |
Value: 0.01 Type: Length (m) Description: Factor by which dimensions of rocket are rescaled |
| r |
Value: {0, 0, 0} Type: Position[3] (m) Description: Position vector from world frame to frame_b (center of the sphere), resolved in world frame |
Connectors (4)
| refAlt |
Type: RealInput Description: Reference altitude |
|
|---|---|---|
| refTrack |
Type: RealInput Description: Reference track |
|
| refVtot |
Type: RealInput Description: Reference total velocity |
|
| positionRef |
Type: RealInput[3] Description: Reference position |
Components (18)
| signChange |
Type: Gain Description: Converts positive altitude into negative world frame z-coordinate |
|
|---|---|---|
| alt2vz |
Type: Derivative Description: Converts reference altitude signal into reference vertical velocity |
|
| groundSpeed |
Type: Pythagoras Description: Solves ground speed from total velocity and vertical velocity |
|
| sinTrack |
Type: Sin Description: Sine of reference track angle |
|
| cosTrack |
Type: Cos Description: Cosine of reference track angle |
|
| vGround2vy |
Type: Product Description: Solves velocity world frame y-component |
|
| vGround2vx |
Type: Product Description: Solves velocity world frame x-component |
|
| refVx |
Type: Speed Description: Reference world frame x-component of total velocity |
|
| refRz |
Type: Position Description: Reference world frame z-component of position |
|
| refVy |
Type: Speed Description: Reference world frame y-component of total velocity |
|
| refX |
Type: Position Description: Reference world frame x-component of position |
|
| refY |
Type: Position Description: Reference world frame y-component of position |
|
| refZ |
Type: Position Description: Reference world frame z-component of position |
|
| prismaticX |
Type: Prismatic Description: Joint allowing movement along world frame x-axis |
|
| prismaticY |
Type: Prismatic Description: Joint allowing movement along world frame y-axis |
|
| prismaticZ |
Type: Prismatic Description: Joint allowing movement along world frame z-axis |
|
| shape |
Type: FixedShape Description: Visualizing an elementary shape with dynamically varying shape attributes (has one frame connector) |
|
| worldFrame |
Type: Fixed Description: Fixed frame to world origin |
Used in Examples (3)
|
Aircraft.Examples Circular path tracking by a quadrotor |
|
|
Aircraft.Examples Compare the impact of two types of controller structures on the motion of the quadrotor |
|
|
Aircraft.Examples Example of tuning autopilot PID controllers |