WOLFRAM SYSTEM MODELER
CameraStabilizerA simple model of the disturbances and dynamics involved in the stabilization of vertical motion |
|
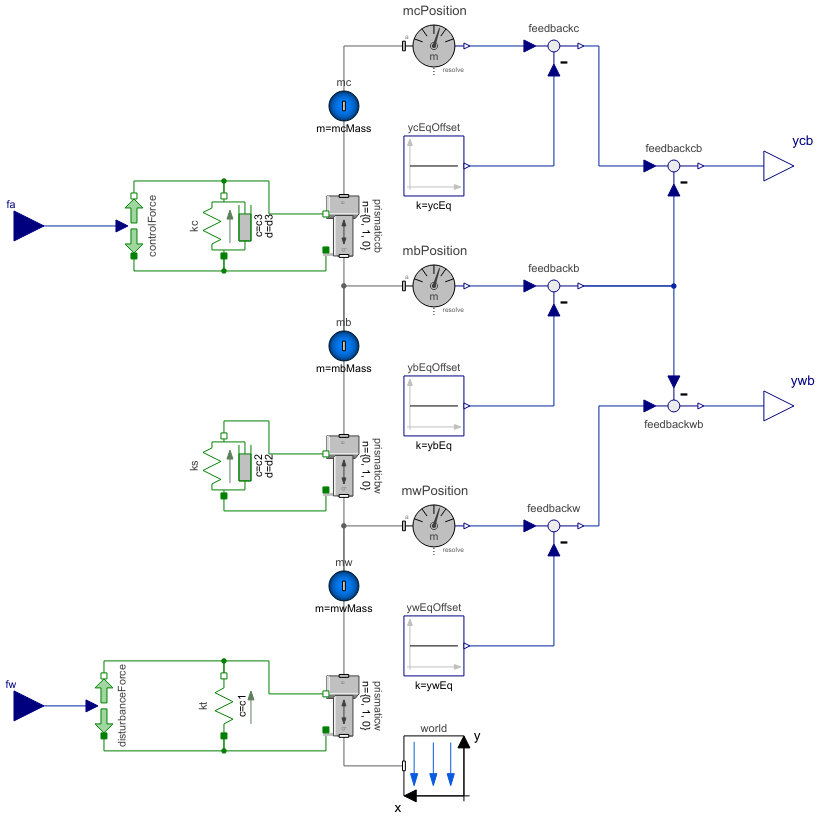
Diagram
Wolfram Language
In[1]:=
SystemModel["DocumentationExamples.Control.CameraStabilizer"]
Out[1]:=
Information
Damped spring-mass systems under the effect of input forces and gravity are connected in series, emulating the general dynamics of an un-controlled vertical motion. With the body at the top representing a camera, this model can be used to generate a control system geared towards stabilization. Bodies are initialized at their equilibrium positions, which are computed with vanishing inputs. Parameters for the characterization of masses, damping and springs are provided, and a constant stores the value of the gravitational acceleration.
Parameters (17)
| mcMass |
Value: 0.5 Type: Mass (kg) Description: Mass of camera |
|---|---|
| mbMass |
Value: 290 Type: Mass (kg) Description: Mass of sprung body |
| mwMass |
Value: 59 Type: Mass (kg) Description: Mass of bottom structure |
| c1 |
Value: 190000 Type: TranslationalSpringConstant (N/m) Description: Spring constant of bottom spring |
| c2 |
Value: 150000 Type: TranslationalSpringConstant (N/m) Description: Spring constant of mid spring |
| c3 |
Value: 100 Type: TranslationalSpringConstant (N/m) Description: Spring constant of top spring |
| l1 |
Value: 0.3 Type: Length (m) Description: Unstretched spring length of bottom spring |
| l2 |
Value: 0.2 Type: Length (m) Description: Unstretched spring length of mid spring |
| l3 |
Value: 0.2 Type: Length (m) Description: Unstretched spring length of top spring |
| d2 |
Value: 1000 Type: TranslationalDampingConstant (N⋅s/m) Description: Damping constant of mid spring |
| d3 |
Value: 10 Type: TranslationalDampingConstant (N⋅s/m) Description: Damping constant of top spring |
| ycEq |
Value: l1 + l2 + l3 - g * mcMass / c3 - g * (mbMass + mcMass) / c2 - g * (mcMass + mbMass + mwMass) / c1 Type: Position (m) Description: Equilibrium position of body mc resolved in world frame |
| ybEq |
Value: l1 + l2 - g * (mbMass + mcMass) / c2 - g * (mcMass + mbMass + mwMass) / c1 Type: Position (m) Description: Equilibrium position of body mb resolved in world frame |
| ywEq |
Value: l1 - g * (mcMass + mbMass + mwMass) / c1 Type: Position (m) Description: Equilibrium position of body mw resolved in world frame |
| yc0 |
Value: ycEq Type: Position (m) Description: Initial position of body mc resolved in world frame |
| yb0 |
Value: ybEq Type: Position (m) Description: Initial position of body mb resolved in world frame |
| yw0 |
Value: ywEq Type: Position (m) Description: Initial position of body mw resolved in world frame |
Connectors (4)
| fw |
Type: RealInput Description: Disturbance force |
|
|---|---|---|
| fa |
Type: RealInput Description: Control force |
|
| ycb |
Type: RealOutput Description: Relative displacement of body mc with respect to body mb, offsetted by their equilibrium points, resolved in world frame |
|
| ywb |
Type: RealOutput Description: Relative displacement of body mw with respect to body mb, offsetted by their equilibrium points, resolved in world frame |
Components (23)
| world |
Type: World Description: World coordinate system + gravity field + default animation definition |
|
|---|---|---|
| kc |
Type: SpringDamper Description: Linear 1D translational spring and damper in parallel |
|
| ks |
Type: SpringDamper Description: Linear 1D translational spring and damper in parallel |
|
| kt |
Type: Spring Description: Linear 1D translational spring |
|
| mc |
Type: PointMass Description: Rigid body where body rotation and inertia tensor is neglected (6 potential states) |
|
| mw |
Type: PointMass Description: Rigid body where body rotation and inertia tensor is neglected (6 potential states) |
|
| mb |
Type: PointMass Description: Rigid body where body rotation and inertia tensor is neglected (6 potential states) |
|
| ycEqOffset |
Type: Constant Description: Generate constant signal of type Real |
|
| ybEqOffset |
Type: Constant Description: Generate constant signal of type Real |
|
| ywEqOffset |
Type: Constant Description: Generate constant signal of type Real |
|
| feedbackc |
Type: Feedback Description: Output difference between commanded and feedback input |
|
| feedbackb |
Type: Feedback Description: Output difference between commanded and feedback input |
|
| feedbackw |
Type: Feedback Description: Output difference between commanded and feedback input |
|
| feedbackwb |
Type: Feedback Description: Output difference between commanded and feedback input |
|
| feedbackcb |
Type: Feedback Description: Output difference between commanded and feedback input |
|
| prismaticcb |
Type: Prismatic Description: Prismatic joint (1 translational degree-of-freedom, 2 potential states, optional axis flange) |
|
| prismaticbw |
Type: Prismatic Description: Prismatic joint (1 translational degree-of-freedom, 2 potential states, optional axis flange) |
|
| prismaticw |
Type: Prismatic Description: Prismatic joint (1 translational degree-of-freedom, 2 potential states, optional axis flange) |
|
| mcPosition |
Type: AbsolutePosition Description: Measure absolute position vector of the origin of a frame connector |
|
| mbPosition |
Type: AbsolutePosition Description: Measure absolute position vector of the origin of a frame connector |
|
| mwPosition |
Type: AbsolutePosition Description: Measure absolute position vector of the origin of a frame connector |
|
| disturbanceForce |
Type: Force2 Description: Input signal acting as force on two flanges |
|
| controlForce |
Type: Force2 Description: Input signal acting as force on two flanges |