WOLFRAM SYSTEM MODELER
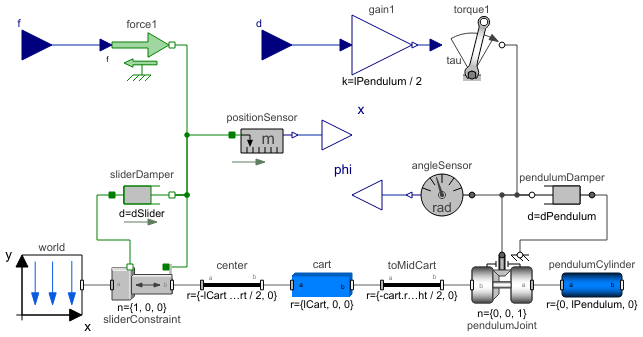
InvertedPendulumWithInputForcesAn inverted pendulum connected to a cart. A force f acts on the center of mass of the cart while a force d acts on the center of mass of the pendulum. d is normal to the radial direction of the pendulum. |
|
Diagram
Wolfram Language
In[1]:=
SystemModel["DocumentationExamples.Control.InvertedPendulumWithInputForces"]
Out[1]:=
Information
Wolfram Language Documentation Examples
This library contains models used in the documentation of system modeling functionality in Wolfram Language. These examples and this library can be explored in the Wolfram Language documentation.
Parameters (9)
| lPendulum |
Value: 0.85 Type: Length (m) Description: Pendulum length |
|---|---|
| rPendulum |
Value: 0.005 Type: Radius (m) Description: Pendulum radius |
| dPendulum |
Value: 0 Type: RotationalDampingConstant (N⋅m⋅s/rad) Description: Pendulum damper constant |
| rhoPendulum |
Value: 7939.023 Type: Density (kg/m³) Description: Pendulum material density |
| dSlider |
Value: 0 Type: TranslationalDampingConstant (N⋅s/m) Description: Pendulum slider constant |
| rhoCart |
Value: 5600 Type: Density (kg/m³) Description: Cart material density |
| lCart |
Value: 0.1 Type: Length (m) Description: Cart length |
| hCart |
Value: 0.1 Type: Height (m) Description: Cart height |
| wCart |
Value: 0.1 Type: Length (m) Description: Cart width |
Connectors (4)
| d |
Type: RealInput Description: Tangential force acting on the center of mass of the pendulum |
|
|---|---|---|
| f |
Type: RealInput Description: Horizontal force acting on the center of mass of the cart |
|
| phi |
Type: RealOutput Description: Angle of the pendulum with respect to the vertical |
|
| x |
Type: RealOutput Description: Horizontal position of the cart |
Components (14)
| world |
Type: World Description: World coordinate system + gravity field + default animation definition |
|
|---|---|---|
| cart |
Type: BodyBox Description: Rigid body with box shape. Mass and animation properties are computed from box data and density (12 potential states) |
|
| pendulumCylinder |
Type: BodyCylinder Description: Rigid body with cylinder shape. Mass and animation properties are computed from cylinder data and density (12 potential states) |
|
| pendulumJoint |
Type: Revolute Description: Revolute joint (1 rotational degree-of-freedom, 2 potential states, optional axis flange) |
|
| toMidCart |
Type: FixedTranslation Description: Fixed translation of frame_b with respect to frame_a |
|
| sliderConstraint |
Type: Prismatic Description: Prismatic joint (1 translational degree-of-freedom, 2 potential states, optional axis flange) |
|
| pendulumDamper |
Type: Damper Description: Linear 1D rotational damper |
|
| sliderDamper |
Type: Damper Description: Linear 1D translational damper |
|
| angleSensor |
Type: AngleSensor Description: Ideal sensor to measure the absolute angle of flange |
|
| positionSensor |
Type: PositionSensor Description: Ideal sensor to measure the absolute position of flange |
|
| center |
Type: FixedTranslation Description: Fixed translation of frame_b with respect to frame_a |
|
| force1 |
Type: Force Description: External force acting on a drive train element as input signal |
|
| torque1 |
Type: Torque Description: Input signal acting as external torque on a flange |
|
| gain1 |
Type: Gain Description: Output the product of a gain value with the input signal |