WOLFRAM SYSTEM MODELER
VectoredThrustAircraftSimplified model of a rockect with vectored thrust |
|
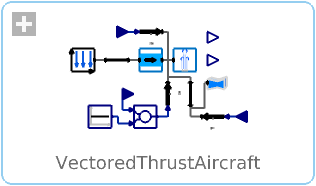
Diagram

Wolfram Language
In[1]:=
SystemModel["DocumentationExamples.Control.VectoredThrustAircraft"]
Out[1]:=
Information
Wolfram Language Documentation Examples
This library contains models used in the documentation of system modeling functionality in Wolfram Language. These examples and this library can be explored in the Wolfram Language documentation.
Parameters (3)
| uniformSizeScale |
Value: 1 Type: Real Description: Factor by which dimensions of rocket are rescaled |
|---|---|
| r |
Value: 34 * uniformSizeScale Type: Distance (m) Description: Distance from point of application of tangential thrust to center of mass |
| d |
Value: 1 Type: TranslationalDampingConstant (N⋅s/m) Description: Linear air resistance constant |
Connectors (5)
| fv |
Type: RealInput Description: Vertical thrust in addition to weight compensation, resolved in the rocket frame |
|
|---|---|---|
| ft |
Type: RealInput Description: Tangential thrust acting at distance r from the center of mass, resolved in the rocket frame |
|
| fwind |
Type: RealInput Description: Wind force acting on the center of mass of the rocket in the direction of the y-axis, resolved in the laboratory frame |
|
| angles |
Type: RealOutput[3] Description: Euler angles from fixed to rocket frame |
|
| z |
Type: RealOutput Description: Position of center of mass |
Components (11)
| world |
Type: World Description: World coordinate system + gravity field + default animation definition |
|
|---|---|---|
| fixedTranslation1 |
Type: FixedTranslation Description: Fixed translation of frame_b with respect to frame_a |
|
| force1 |
Type: WorldForce Description: External force acting at frame_b, defined by 3 input signals and resolved in frame world, frame_b or frame_resolve |
|
| force2 |
Type: WorldForce Description: External force acting at frame_b, defined by 3 input signals and resolved in frame world, frame_b or frame_resolve |
|
| linearAirResistance |
Type: LinearAirResistance Description: Linear air resistance |
|
| add |
Type: Add Description: Output the sum of the two inputs |
|
| const |
Type: Constant Description: Generate constant signal of type Real |
|
| rocket |
Type: Rocket Description: Body and shape for rocket |
|
| fixedTranslation2 |
Type: FixedTranslation Description: Fixed translation of frame_b with respect to frame_a |
|
| fixedShape1 |
Type: FixedShape Description: Visualizing an elementary shape with dynamically varying shape attributes (has one frame connector) |
|
| windForce |
Type: WorldForce Description: External force acting at frame_b, defined by 3 input signals and resolved in frame world, frame_b or frame_resolve |