WOLFRAM SYSTEM MODELER
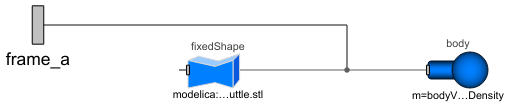
RocketBody and shape for rocket |
|
Diagram
Wolfram Language
In[1]:=
SystemModel["DocumentationExamples.Control.VectoredThrustAircraft.Rocket"]
Out[1]:=

Information
Wolfram Language Documentation Examples
This library contains models used in the documentation of system modeling functionality in Wolfram Language. These examples and this library can be explored in the Wolfram Language documentation.
Parameters (3)
| bodyVolume |
Value: 4165.934 * uniformSizeScale ^ 3 Type: Volume (m³) Description: Volume of the body |
|---|---|
| uniformDensity |
Value: 7700 Type: Density (kg/m³) Description: Uniform density of the body. If it is not provided, it defaults to 7.7 g.cm-3 |
| uniformSizeScale |
Value: 1 Type: Length (m) Description: Uniform size scaling: length in meters of a unit of length of original region |
Connectors (1)
| frame_a |
Type: Frame_a Description: Coordinate system fixed to the component with one cut-force and cut-torque |
|---|
Components (3)
| world |
Type: World Description: World coordinate system + gravity field + default animation definition |
|
|---|---|---|
| body |
Type: Body Description: Rigid body with mass, inertia tensor and one frame connector (12 potential states) |
|
| fixedShape |
Type: FixedShape Description: Visualizing an elementary shape with dynamically varying shape attributes (has one frame connector) |
Used in Examples (1)
|
DocumentationExamples.Control Simplified model of a rockect with vectored thrust |