WOLFRAM SYSTEM MODELER
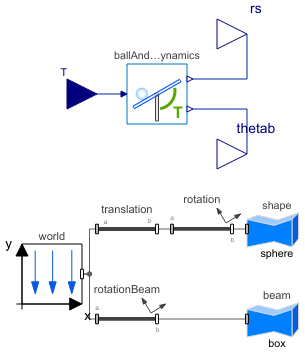
BallAndBeamSimple model of a ball on a beam, rolling without slipping |
|
Diagram
Wolfram Language
In[1]:=
SystemModel["DocumentationExamples.Modeling.BallAndBeamClosedLoopSystem.BallAndBeam"]
Out[1]:=
Information
Wolfram Language Documentation Examples
This library contains models used in the documentation of system modeling functionality in Wolfram Language. These examples and this library can be explored in the Wolfram Language documentation.
Parameters (8)
| g |
Value: Modelica.Constants.g_n Type: Acceleration (m/s²) Description: Gravitational acceleration |
|---|---|
| lb |
Value: 1 Type: Length (m) Description: Beam length |
| wb |
Value: 0.01 Type: Length (m) Description: Beam width |
| hb |
Value: 0.15 Type: Length (m) Description: Beam height |
| mb |
Value: 0.2 Type: Mass (kg) Description: Mass of the beam |
| ms |
Value: 0.05 Type: Mass (kg) Description: Mass of the sphere |
| Rs |
Value: 0.1 Type: Radius (m) Description: Radius of the sphere |
| b |
Value: 0 Type: RotationalDampingConstant (N⋅m⋅s/rad) Description: Beam rotational damping constant |
Connectors (3)
| T |
Type: RealInput Description: External torque applied to the beam measured in the lab frame |
|
|---|---|---|
| rs |
Type: RealOutput Description: Position of the center of mass of the sphere along the path of the beam measured from the middle of the beam |
|
| thetab |
Type: RealOutput Description: Angle that the beam forms with the horizontal |
Components (7)
| ballAndBeamDynamics |
Type: BallAndBeamDynamics Description: Sphere on a beam dynamics, rolling without slipping |
|
|---|---|---|
| world |
Type: World Description: World coordinate system + gravity field + default animation definition |
|
| translation |
Type: Translation Description: Translation of frame_b with respect to frame_a |
|
| rotation |
Type: Rotation Description: Fixed translation followed by a rotation of frame_b with respect to frame_a. This component rotates frame_a around an angle with a fixed axis. |
|
| shape |
Type: FixedShape Description: Visualizing an elementary shape with dynamically varying shape attributes (has one frame connector) |
|
| rotationBeam |
Type: Rotation Description: Fixed translation followed by a rotation of frame_b with respect to frame_a. This component rotates frame_a around an angle with a fixed axis. |
|
| beam |
Type: FixedShape Description: Visualizing an elementary shape with dynamically varying shape attributes (has one frame connector) |
Used in Components (1)
|
DocumentationExamples.Modeling.BallAndBeamClosedLoopSystem A model that encloses a plant and passes its states as outputs |