WOLFRAM SYSTEM MODELER
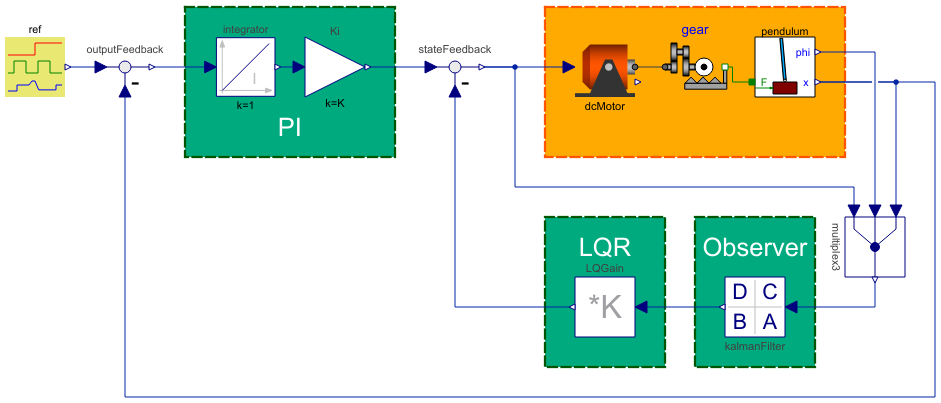
InvertedPendulumLQGIA controlled inverted pendulum system. |
|
Diagram
Wolfram Language
In[1]:=
SystemModel["DocumentationExamples.Modeling.InvertedPendulum.InvertedPendulumLQGI"]
Out[1]:=
Information
Wolfram Language Documentation Examples
This library contains models used in the documentation of system modeling functionality in Wolfram Language. These examples and this library can be explored in the Wolfram Language documentation.
Parameters (5)
| K |
Value: 31.6228 Type: Real |
|---|---|
| L |
Value: {{101.693, 19.9425, -55.6326, -38.7719, 0.032827}} Type: Real[:,:] |
| Aobs |
Value: {{-10.1056, 1, -0.416969, 0, 0}, {-14.6044, -0.33108, -2.11041, -9.15381, 20.4548}, {-0.416969, 0, -0.0228173, 1, 0}, {2.93905, -0.045769, -0.0871919, -3.72274, 8.31869}, {3.62464, 0, 0.149582, -4469.12, -2600}} Type: Real[:,:] |
| Bobs |
Value: {{0, 10.1056, 0.416969}, {0, 51.1481, 2.11041}, {0, 0.416969, 0.0228173}, {0, 2.11281, 0.0871919}, {1000, -3.62464, -0.149582}} Type: Real[:,:] |
| Cobs |
Value: {{1, 0, 0, 0, 0}, {0, 1, 0, 0, 0}, {0, 0, 1, 0, 0}, {0, 0, 0, 1, 0}, {0, 0, 0, 0, 1}} Type: Real[:,:] |
Components (11)
| ref |
Type: ReferenceInput Description: Controller based on LQ (Linear Quadratic) design for e.g. an inverted pendulum. |
|
|---|---|---|
| outputFeedback |
Type: Feedback Description: Output difference between commanded and feedback input |
|
| stateFeedback |
Type: Feedback Description: Output difference between commanded and feedback input |
|
| Ki |
Type: Gain Description: Output the product of a gain value with the input signal |
|
| kalmanFilter |
Type: StateSpace Description: Linear state space system |
|
| multiplex3 |
Type: Multiplex3 Description: Multiplexer block for three input connectors |
|
| integrator |
Type: Integrator Description: Output the integral of the input signal with optional reset |
|
| LQGain |
Type: MatrixGain Description: Output the product of a gain matrix with the input signal vector |
|
| gear |
Type: GearBox Description: A gear system with a rotational gear coupled to a pinion and a rack. |
|
| pendulum |
Type: Pendulum Description: An inverted pendulum connected to a cart. |
|
| dcMotor |
Type: DCMotor Description: A model of a DC motor |