WOLFRAM SYSTEM MODELER
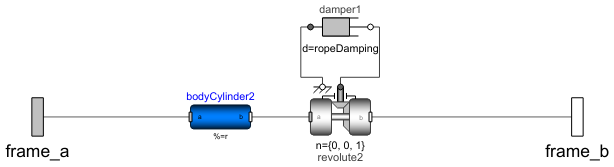
ropeSegmentA model of a segment of a rope |
|
Diagram
Wolfram Language
In[1]:=
SystemModel["DocumentationExamples.Simulation.Catapult.Components.ropeSegment"]
Out[1]:=

Information
Wolfram Language Documentation Examples
This library contains models used in the documentation of system modeling functionality in Wolfram Language. These examples and this library can be explored in the Wolfram Language documentation.
Parameters (4)
| ropeDamping |
Type: Real |
|---|---|
| cylinderLength |
Type: Real |
| nCylinders |
Type: Integer |
| animation |
Value: true Type: Boolean |
Connectors (2)
Components (3)
| bodyCylinder2 |
Type: BodyCylinder Description: Rigid body with cylinder shape. Mass and animation properties are computed from cylinder data and density (12 potential states) |
|
|---|---|---|
| revolute2 |
Type: Revolute Description: Revolute joint (1 rotational degree-of-freedom, 2 potential states, optional axis flange) |
|
| damper1 |
Type: Damper Description: Linear 1D rotational damper |
Used in Components (1)
|
DocumentationExamples.Simulation.Catapult.Components A model of the projectile and dragging rope in a catapult |