WOLFRAM SYSTEM MODELER
BallBall that rolls on the beam |
|
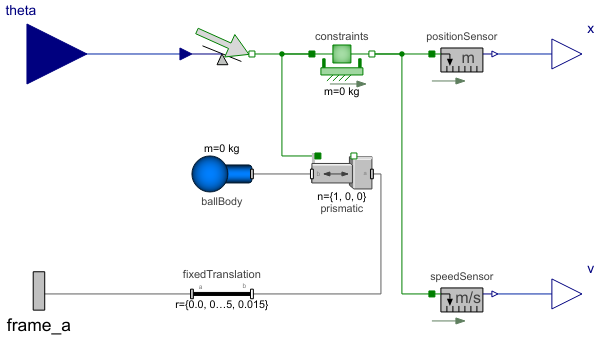
Diagram
Wolfram Language
In[1]:=
SystemModel["EducationExamples.Physics.BallAndBeam.Components.Ball"]
Out[1]:=
Information
Model for the ball that rolls along the beam. Contains multibody visualizers that display the translational position of the ball as well as the rotation. Uses GravitationalPull to calculate the longitudal force and contains constraints that stops the ball at the edge of the beam.
Parameters (3)
Connectors (4)
| x |
Type: RealOutput Description: 'output Real' as connector |
|
|---|---|---|
| theta |
Type: RealInput Description: 'input Real' as connector |
|
| frame_a |
Type: Frame_a Description: Coordinate system fixed to the component with one cut-force and cut-torque (filled rectangular icon) |
|
| v |
Type: RealOutput Description: 'output Real' as connector |
Components (7)
| constraints |
Type: MassWithStopAndFriction Description: Sliding mass with hard stop and Stribeck friction |
|
|---|---|---|
| prismatic |
Type: Prismatic Description: Prismatic joint (1 translational degree-of-freedom, 2 potential states, optional axis flange) |
|
| ballBody |
Type: Body Description: Rigid body with mass, inertia tensor and one frame connector (12 potential states) |
|
| positionSensor |
Type: PositionSensor Description: Ideal sensor to measure the absolute position of flange |
|
| rollingBall |
Type: GravitationalPull Description: Displacement of the ball based on gravity |
|
| fixedTranslation |
Type: FixedTranslation Description: Fixed translation of frame_b with respect to frame_a |
|
| speedSensor |
Type: SpeedSensor Description: Ideal sensor to measure the absolute velocity of flange |
Used in Components (1)
|
EducationExamples.Physics.BallAndBeam.Components Ball, beam and base assembly |