WOLFRAM SYSTEM MODELER
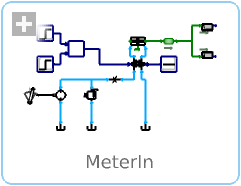
MeterInExample circuit with meter-in flow control |
|
Diagram

Wolfram Language
In[1]:=
SystemModel["Hydraulic.Examples.FlowControl.MeterIn"]
Out[1]:=
Information
This example model shows how to move a load with a cylinder and how the cylinder motion can be changed by adjusting the throttle. The method of placing the flow control valve between the pump and actuator is called meter-in.
In both Fig. 1 and 2, the blue line shows the behavior when the throttle opening has been decreased. The red line shows the behavior without decreasing the throttle opening.
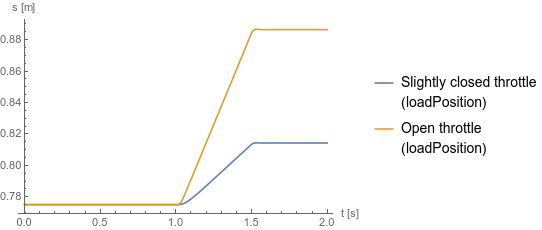
Fig. 1 Load position with slightly closed(throttleArea = 1e-07 m^2) and open (throttleArea = 1e-06 m^2) throttle orifice opening respectively
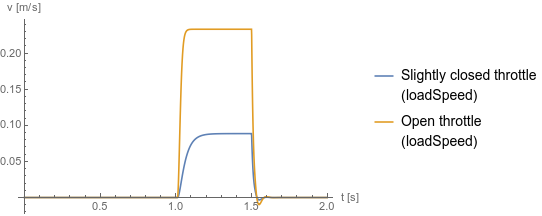
Fig. 2 Load speed with slighty closed (throttleArea = 1e-07 m^2) and open (throttleArea = 1e-06 m^2) throttle orifice opening respectively
In both Fig. 1 and 2, the blue line shows the behavior when the throttle opening has been decreased. The red line shows the behavior without decreasing the throttle opening.
Fig. 1 Load position with slightly closed(throttleArea = 1e-07 m^2) and open (throttleArea = 1e-06 m^2) throttle orifice opening respectively
Fig. 2 Load speed with slighty closed (throttleArea = 1e-07 m^2) and open (throttleArea = 1e-06 m^2) throttle orifice opening respectively
Reference
Industrial Hydraulics Manual, 5th ed., Maumee, OH: Eaton Hydraulics Training Services, 2008 p. 298.Parameters (2)
Components (17)
| medium |
Type: Medium Description: Medium in the component |
|
|---|---|---|
| tank1 |
Type: Tank Description: Simple tank with constant pressure |
|
| tank2 |
Type: Tank Description: Simple tank with constant pressure |
|
| pump |
Type: Pump Description: Model of a pump with fixed displacement and volumes |
|
| tank3 |
Type: Tank Description: Simple tank with constant pressure |
|
| mass |
Type: Mass Description: Sliding mass with inertia |
|
| positionSensor |
Type: PositionSensor Description: Ideal sensor to measure the absolute position of flange |
|
| cylinderDouble |
Type: CylinderDouble Description: Double cylinder model |
|
| const |
Type: Constant Description: Generate constant signal of type Real |
|
| constantSpeed |
Type: ConstantSpeed Description: Constant speed, not dependent on torque |
|
| pressureReliefValve |
Type: PressureReliefValve Description: Pressure valve, controlled by the pressure difference between the ports |
|
| controlValve |
Type: PCVE43TandemCenter Description: Electrically actuated proportional control valve with four ports and three states |
|
| min |
Type: Min Description: Pass through the smallest signal |
|
| stopStep |
Type: Step Description: Generate step signal of type Real |
|
| startStep |
Type: Step Description: Generate step signal of type Real |
|
| throttle |
Type: FixedTurbulentThrottle Description: Turbulent restriction |
|
| speedSensor |
Type: SpeedSensor Description: Ideal sensor to measure the absolute velocity of flange |