WOLFRAM SYSTEM MODELER
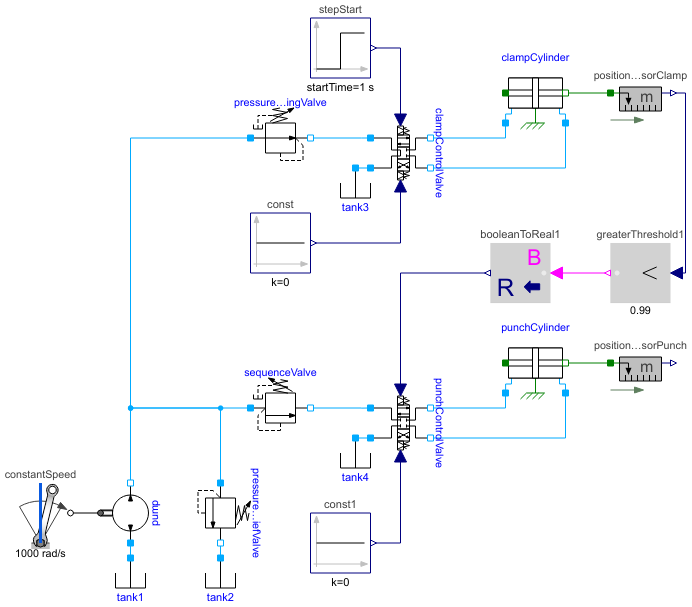
SequenceCircuit2Example circuit with two cylinders working in a sequence |
|
Diagram
Wolfram Language
In[1]:=
SystemModel["Hydraulic.Examples.MultipleActuators.SequenceCircuit2"]
Out[1]:=

Information
This example model shows a sequence of two operations: first a clamping and then a punching operation. A sequence valve is used to make sure the punching operation is performed when a minimum pressure has been reached. A pressure-reducing valve is used to make sure the clamping pressure does not exceed a maximum pressure.
Fig. 1 shows how the punching cylinder starts to move when the clamping cylinder has reached a certain position. Fig. 2 shows how the cylinder pressures are affected by the sequence valve and the pressure-reducing valve.
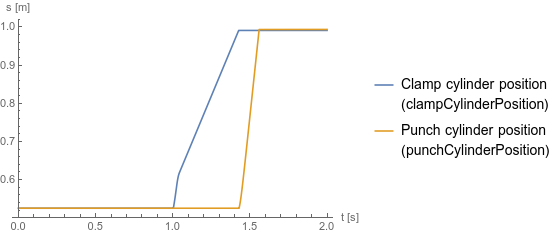
Fig. 1 Cylinder positions
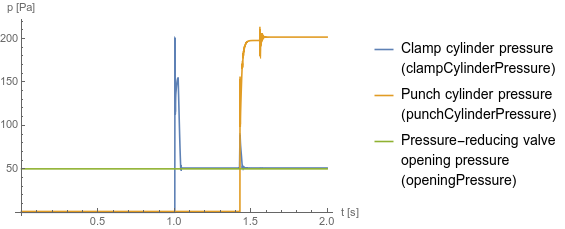
Fig. 2 Cylinder pressures. Notice how the clamping pressure is reduced by the pressure-reducing valve opening pressure. Also notice that the punching pressure is larger than the clamping pressure.
Fig. 1 shows how the punching cylinder starts to move when the clamping cylinder has reached a certain position. Fig. 2 shows how the cylinder pressures are affected by the sequence valve and the pressure-reducing valve.
Fig. 1 Cylinder positions
Fig. 2 Cylinder pressures. Notice how the clamping pressure is reduced by the pressure-reducing valve opening pressure. Also notice that the punching pressure is larger than the clamping pressure.
Reference
Industrial Hydraulics Manual, 5th ed., Maumee, OH: Eaton Hydraulics Training Services, 2008 p. 498.Parameters (2)
Components (21)
| medium |
Type: Medium Description: Medium in the component |
|
|---|---|---|
| clampCylinder |
Type: CylinderDouble Description: Double cylinder model |
|
| stepStart |
Type: Step Description: Generate step signal of type Real |
|
| tank1 |
Type: Tank Description: Simple tank with constant pressure |
|
| positionSensorClamp |
Type: PositionSensor Description: Ideal sensor to measure the absolute position of flange |
|
| pump |
Type: Pump Description: Model of a pump with fixed displacement and volumes |
|
| punchControlValve |
Type: DCVE43ClosedCenter Description: Electrically actuated proportional control valve with four ports and three states |
|
| clampControlValve |
Type: DCVE43TandemCenter Description: Electrically actuated proportional control valve with four ports and three states |
|
| pressureReliefValve |
Type: PressureReliefValve Description: Pressure valve, controlled by the pressure difference between the ports |
|
| sequenceValve |
Type: SequenceValve Description: Pressure valve, controlled by the pressure at port_a |
|
| constantSpeed |
Type: ConstantSpeed Description: Constant speed, not dependent on torque |
|
| tank2 |
Type: Tank Description: Simple tank with constant pressure |
|
| pressureReducingValve |
Type: PressureReducingValve Description: Pressure valve, controlled by the pressure difference between the ports |
|
| tank3 |
Type: Tank Description: Simple tank with constant pressure |
|
| tank4 |
Type: Tank Description: Simple tank with constant pressure |
|
| punchCylinder |
Type: CylinderDouble Description: Double cylinder model |
|
| positionSensorPunch |
Type: PositionSensor Description: Ideal sensor to measure the absolute position of flange |
|
| const |
Type: Constant Description: Generate constant signal of type Real |
|
| const1 |
Type: Constant Description: Generate constant signal of type Real |
|
| greaterThreshold1 |
Type: GreaterThreshold Description: Output y is true, if input u is greater than threshold |
|
| booleanToReal1 |
Type: BooleanToReal Description: Convert Boolean to Real signal |