WOLFRAM SYSTEMMODELER
Boom |
|
Diagram
Wolfram Language
In[1]:=

SystemModel["IndustryExamples.HeavyEquipment.Excavator.Components.Boom"]
Out[1]:=
Information
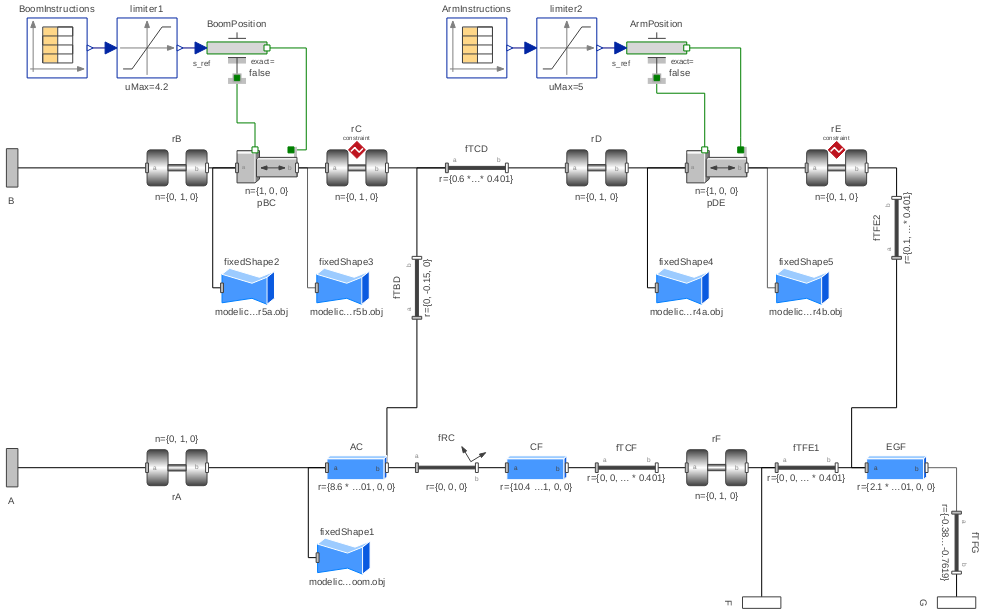
Excavator: Boom
Description
This class models the boom part of the excavator.
The boom has two prismatic joints that emulate the hydraulic cylinders of an excavator. The joints are controlled with instructions from CombiTimeTable components.
 Terms and Conditions of Use
Terms and Conditions of Use
 Terms and Conditions of Use
Terms and Conditions of UseConnectors (4)
Components (29)
| pBC |
Type: Prismatic Description: |
|
|---|---|---|
| AC |
Type: BodyBox Description: |
|
| rA |
Type: Revolute Description: |
|
| rB |
Type: Revolute Description: |
|
| fTCD |
Type: FixedTranslation Description: |
|
| CF |
Type: BodyBox Description: |
|
| fRC |
Type: FixedRotation Description: |
|
| rC |
Type: RevolutePlanarLoopConstraint Description: |
|
| fTBD |
Type: FixedTranslation Description: |
|
| rD |
Type: Revolute Description: |
|
| pDE |
Type: Prismatic Description: |
|
| EGF |
Type: BodyBox Description: |
|
| rF |
Type: Revolute Description: |
|
| rE |
Type: RevolutePlanarLoopConstraint Description: |
|
| fTFG |
Type: FixedTranslation Description: |
|
| fTFE2 |
Type: FixedTranslation Description: |
|
| fTFE1 |
Type: FixedTranslation Description: |
|
| fTCF |
Type: FixedTranslation Description: |
|
| BoomPosition |
Type: Position Description: |
|
| ArmPosition |
Type: Position Description: |
|
| BoomInstructions |
Type: CombiTimeTable Description: |
|
| ArmInstructions |
Type: CombiTimeTable Description: |
|
| fixedShape1 |
Type: FixedShape Description: |
|
| fixedShape2 |
Type: FixedShape Description: |
|
| fixedShape3 |
Type: FixedShape Description: |
|
| fixedShape4 |
Type: FixedShape Description: |
|
| fixedShape5 |
Type: FixedShape Description: |
|
| limiter1 |
Type: Limiter Description: |
|
| limiter2 |
Type: Limiter Description: |
Used in Examples (1)
|
Model of an excavator, analysing the reach of the mechanical arm. |