WOLFRAM SYSTEM MODELER
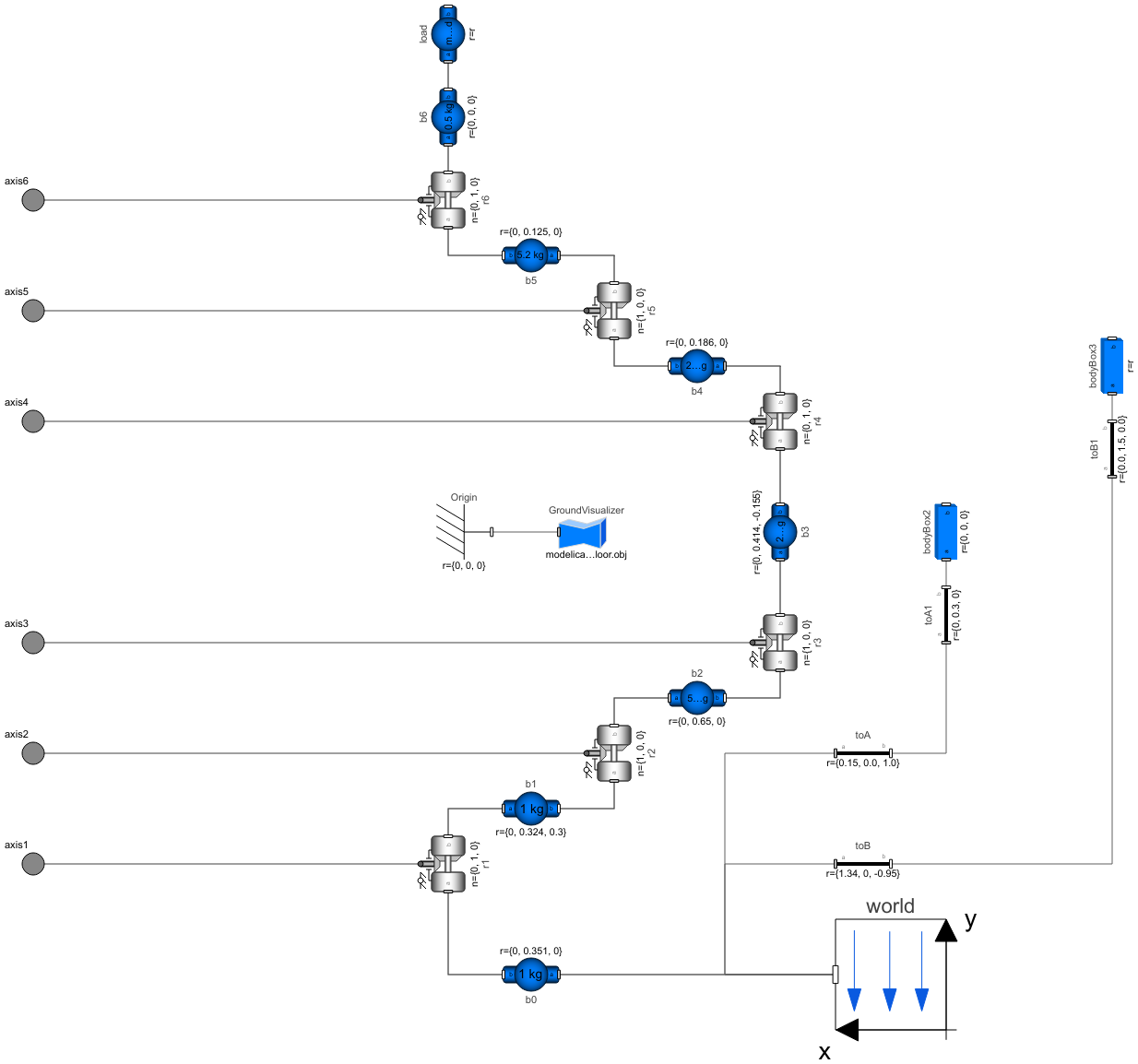
MechanicalStructureModel of the mechanical part of the r3 robot (without animation) |
|
Diagram
Wolfram Language
In[1]:=

SystemModel["IndustryExamples.IndustrialManufacturing.IndustrialRobot.Components.MechanicalStructure"]
Out[1]:=
Information
This model contains the mechanical parts of the industrial robot. It is a modified version of MechanicalStructure from the Modelica Standard Library, with added visualization components.
Parameters (4)
| animation |
Value: true Type: Boolean Description: = true, if animation shall be enabled |
|---|---|
| mLoad |
Value: 15 Type: Mass (kg) Description: Mass of load |
| rLoad |
Value: {0, 0.25, 0} Type: Position[3] (m) Description: Distance from last flange to load mass> |
| g |
Value: 9.81 Type: Acceleration (m/s²) Description: Gravity acceleration |
Connectors (6)
| axis1 |
Type: Flange_a Description: One-dimensional rotational flange of a shaft (filled circle icon) |
|
|---|---|---|
| axis2 |
Type: Flange_a Description: One-dimensional rotational flange of a shaft (filled circle icon) |
|
| axis3 |
Type: Flange_a Description: One-dimensional rotational flange of a shaft (filled circle icon) |
|
| axis4 |
Type: Flange_a Description: One-dimensional rotational flange of a shaft (filled circle icon) |
|
| axis5 |
Type: Flange_a Description: One-dimensional rotational flange of a shaft (filled circle icon) |
|
| axis6 |
Type: Flange_a Description: One-dimensional rotational flange of a shaft (filled circle icon) |
Components (23)
| world |
Type: World Description: World coordinate system + gravity field + default animation definition |
|
|---|---|---|
| r1 |
Type: Revolute Description: Revolute joint (1 rotational degree-of-freedom, 2 potential states, optional axis flange) |
|
| r2 |
Type: Revolute Description: Revolute joint (1 rotational degree-of-freedom, 2 potential states, optional axis flange) |
|
| r3 |
Type: Revolute Description: Revolute joint (1 rotational degree-of-freedom, 2 potential states, optional axis flange) |
|
| r4 |
Type: Revolute Description: Revolute joint (1 rotational degree-of-freedom, 2 potential states, optional axis flange) |
|
| r5 |
Type: Revolute Description: Revolute joint (1 rotational degree-of-freedom, 2 potential states, optional axis flange) |
|
| r6 |
Type: Revolute Description: Revolute joint (1 rotational degree-of-freedom, 2 potential states, optional axis flange) |
|
| b0 |
Type: BodyShape Description: Rigid body with mass, inertia tensor, different shapes for animation, and two frame connectors (12 potential states) |
|
| b1 |
Type: BodyShape Description: Rigid body with mass, inertia tensor, different shapes for animation, and two frame connectors (12 potential states) |
|
| b2 |
Type: BodyShape Description: Rigid body with mass, inertia tensor, different shapes for animation, and two frame connectors (12 potential states) |
|
| b3 |
Type: BodyShape Description: Rigid body with mass, inertia tensor, different shapes for animation, and two frame connectors (12 potential states) |
|
| b4 |
Type: BodyShape Description: Rigid body with mass, inertia tensor, different shapes for animation, and two frame connectors (12 potential states) |
|
| b5 |
Type: BodyShape Description: Rigid body with mass, inertia tensor, different shapes for animation, and two frame connectors (12 potential states) |
|
| b6 |
Type: BodyShape Description: Rigid body with mass, inertia tensor, different shapes for animation, and two frame connectors (12 potential states) |
|
| load |
Type: BodyShape Description: Rigid body with mass, inertia tensor, different shapes for animation, and two frame connectors (12 potential states) |
|
| toA |
Type: FixedTranslation Description: Fixed translation of frame_b with respect to frame_a |
|
| toB |
Type: FixedTranslation Description: Fixed translation of frame_b with respect to frame_a |
|
| toA1 |
Type: FixedTranslation Description: Fixed translation of frame_b with respect to frame_a |
|
| bodyBox2 |
Type: BodyBox Description: Rigid body with box shape. Mass and animation properties are computed from box data and density (12 potential states) |
|
| toB1 |
Type: FixedTranslation Description: Fixed translation of frame_b with respect to frame_a |
|
| bodyBox3 |
Type: BodyBox Description: Rigid body with box shape. Mass and animation properties are computed from box data and density (12 potential states) |
|
| Origin |
Type: Fixed Description: Frame fixed in the world frame at a given position |
|
| GroundVisualizer |
Type: FixedShape Description: Visualizing an elementary shape with dynamically varying shape attributes (has one frame connector) |
Used in Examples (1)
|
IndustryExamples.IndustrialManufacturing.IndustrialRobot 6 degree of freedom robot with path planning, controllers, motors, brakes, gears and mechanics. |