WOLFRAM SYSTEM MODELER
FullRobot6 degree of freedom robot with path planning, controllers, motors, brakes, gears and mechanics. |
|
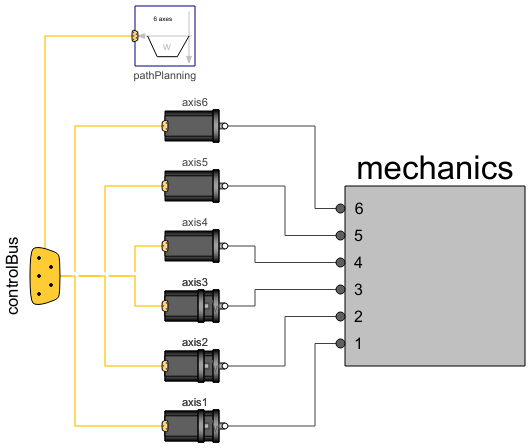
Diagram
Wolfram Language
In[1]:=
SystemModel["IndustryExamples.IndustrialManufacturing.IndustrialRobot.FullRobot"]
Out[1]:=
Information
This is a six degrees of freedom robot with path planning, controllers, motors, brakes, gears, and mechanics.
Simulation
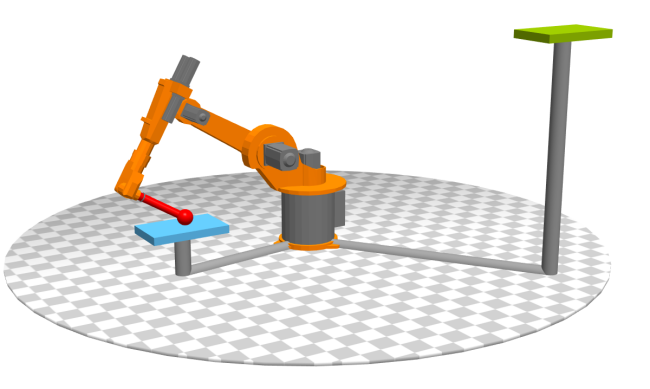
To simulate the robot and view a 3D animation of it, follow the steps below:
Click the Simulate button: 
Click the Animate button: 
Instant Plotting
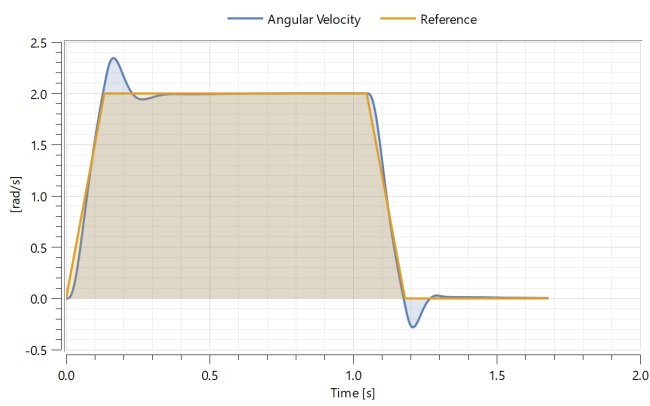
Compare the planned trajectory for one of the robot's axes with the simulated controlled path by plotting their respective variables.
A preffered Model plot will automatically be displayed, showing reference speed values for the different axes, as well as the actual speed values. There are multiple Model plots showing only individual axes. Opening the Model plot Axis1 in Axes velocity vs reference group, you will see the plot below.
Real-Time Simulation
It is possible to synchronize the simulation with real time. To do this, click the Settings tab in Simulation Center and choose the Synchronize with real-time option.
Parameters (37)
| mLoad |
Value: 15 Type: Mass (kg) Description: Mass of load |
|---|---|
| rLoad |
Value: {0.1, 0.25, 0.1} Type: Position[3] (m) Description: Distance from last flange to load mass |
| g |
Value: 9.81 Type: Acceleration (m/s²) Description: Gravity acceleration |
| refStartTime |
Value: 0 Type: Time (s) Description: Start time of reference motion |
| refSwingTime |
Value: 0.5 Type: Time (s) Description: Additional time after reference motion is in rest before simulation is stopped |
| startAngle1 |
Value: 0 Type: Real (°) Description: Start angle of axis 1 |
| startAngle2 |
Value: 60.0 Type: Real (°) Description: Start angle of axis 2 |
| startAngle3 |
Value: 90 Type: Real (°) Description: Start angle of axis 3 |
| startAngle4 |
Value: 0 Type: Real (°) Description: Start angle of axis 4 |
| startAngle5 |
Value: 90 Type: Real (°) Description: Start angle of axis 5 |
| startAngle6 |
Value: 45 Type: Real (°) Description: Start angle of axis 6 |
| endAngle1 |
Value: 120 Type: Real (°) Description: End angle of axis 1 |
| endAngle2 |
Value: 20 Type: Real (°) Description: End angle of axis 2 |
| endAngle3 |
Value: 60.0 Type: Real (°) Description: End angle of axis 3 |
| endAngle4 |
Value: 0 Type: Real (°) Description: End angle of axis 4 |
| endAngle5 |
Value: 0 Type: Real (°) Description: End angle of axis 5 |
| endAngle6 |
Value: 90 Type: Real (°) Description: End angle of axis 6 |
| refSpeedMax |
Value: {2, 1.5, 5, 3.1, 3.1, 4.1} Type: AngularVelocity[6] (rad/s) Description: Maximum reference speeds of all joints |
| refAccMax |
Value: {15, 15, 15, 60, 60, 60} Type: AngularAcceleration[6] (rad/s²) Description: Maximum reference accelerations of all joints |
| kp1 |
Value: 5 Type: Real Description: Gain of position controller |
| ks1 |
Value: 0.5 Type: Real Description: Gain of speed controller |
| Ts1 |
Value: 0.05 Type: Time (s) Description: Time constant of integrator of speed controller |
| kp2 |
Value: 5 Type: Real Description: Gain of position controller |
| ks2 |
Value: 0.5 Type: Real Description: Gain of speed controller |
| Ts2 |
Value: 0.05 Type: Time (s) Description: Time constant of integrator of speed controller |
| kp3 |
Value: 5 Type: Real Description: Gain of position controller |
| ks3 |
Value: 0.5 Type: Real Description: Gain of speed controller |
| Ts3 |
Value: 0.05 Type: Time (s) Description: Time constant of integrator of speed controller |
| kp4 |
Value: 5 Type: Real Description: Gain of position controller |
| ks4 |
Value: 0.5 Type: Real Description: Gain of speed controller |
| Ts4 |
Value: 0.05 Type: Time (s) Description: Time constant of integrator of speed controller |
| kp5 |
Value: 5 Type: Real Description: Gain of position controller |
| ks5 |
Value: 0.5 Type: Real Description: Gain of speed controller |
| Ts5 |
Value: 0.05 Type: Time (s) Description: Time constant of integrator of speed controller |
| kp6 |
Value: 5 Type: Real Description: Gain of position controller |
| ks6 |
Value: 0.5 Type: Real Description: Gain of speed controller |
| Ts6 |
Value: 0.05 Type: Time (s) Description: Time constant of integrator of speed controller |
Components (8)
| mechanics |
Type: MechanicalStructure Description: Model of the mechanical part of the r3 robot (without animation) |
|
|---|---|---|
| pathPlanning |
Type: PathPlanning6 Description: Generate reference angles for fastest kinematic movement |
|
| axis1 |
Type: AxisType1 Description: Axis model of the r3 joints 1,2,3 |
|
| axis2 |
Type: AxisType1 Description: Axis model of the r3 joints 1,2,3 |
|
| axis3 |
Type: AxisType1 Description: Axis model of the r3 joints 1,2,3 |
|
| axis4 |
Type: AxisType2 Description: Axis model of the r3 joints 4,5,6 |
|
| axis5 |
Type: AxisType2 Description: Axis model of the r3 joints 4,5,6 |
|
| axis6 |
Type: AxisType2 Description: Axis model of the r3 joints 4,5,6 |