WOLFRAM SYSTEM MODELER
AxisType2Axis model of the r3 joints 4,5,6 |
|
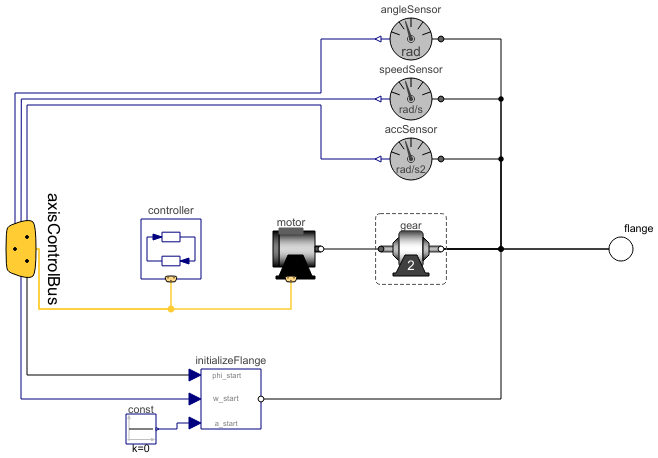
Diagram
Wolfram Language
In[1]:=

SystemModel["Modelica.Mechanics.MultiBody.Examples.Systems.RobotR3.Utilities.AxisType2"]
Out[1]:=

Information
This information is part of the Modelica Standard Library maintained by the Modelica Association.
The axis model consists of the controller, the motor including current controller and the gearbox including gear elasticity and bearing friction. The only difference to the axis model of joints 4,5,6 (= model axisType2) is that elasticity and damping in the gear boxes are not neglected.
The input signals of this component are the desired angle and desired angular velocity of the joint. The reference signals have to be "smooth" (position has to be differentiable at least 2 times). Otherwise, the gear elasticity leads to significant oscillations.
Default values of the parameters are given for the axis of joint 1.
Parameters (12)
| kp |
Value: 10 Type: Real Description: Gain of position controller |
|---|---|
| ks |
Value: 1 Type: Real Description: Gain of speed controller |
| Ts |
Value: 0.01 Type: Time (s) Description: Time constant of integrator of speed controller |
| k |
Value: 1.1616 Type: Real Description: Gain of motor |
| w |
Value: 4590 Type: Real Description: Time constant of motor |
| D |
Value: 0.6 Type: Real Description: Damping constant of motor |
| J |
Value: 0.0013 Type: Inertia (kg⋅m²) Description: Moment of inertia of motor |
| ratio |
Value: -105 Type: Real Description: Gear ratio |
| Rv0 |
Value: 0.4 Type: Torque (N⋅m) Description: Viscous friction torque at zero velocity |
| Rv1 |
Value: (0.13 / 160) Type: Real (N⋅m⋅s/rad) Description: Viscous friction coefficient |
| peak |
Value: 1 Type: Real Description: Maximum static friction torque is peak*Rv0 (peak >= 1) |
| gear |
Replaceable Component Type: GearType2 Description: Motor inertia and gearbox model for r3 joints 4,5,6 |
Connectors (2)
| flange |
Type: Flange_b Description: One-dimensional rotational flange of a shaft (non-filled circle icon) |
|
|---|---|---|
| axisControlBus |
Type: AxisControlBus Description: Data bus for one robot axis |
Components (8)
| gear |
Type: GearType2 Description: Motor inertia and gearbox model for r3 joints 4,5,6 |
|
|---|---|---|
| motor |
Type: Motor Description: Motor model including current controller of r3 motors |
|
| controller |
Type: Controller Description: P-PI cascade controller for one axis |
|
| angleSensor |
Type: AngleSensor Description: Ideal sensor to measure the absolute angle of flange |
|
| speedSensor |
Type: SpeedSensor Description: Ideal sensor to measure the absolute angular velocity of flange |
|
| accSensor |
Type: AccSensor Description: Ideal sensor to measure the absolute angular acceleration of flange |
|
| initializeFlange |
Type: InitializeFlange Description: Initializes a flange with pre-defined angle, speed and angular acceleration (usually, this is reference data from a control bus) |
|
| const |
Type: Constant Description: Generate constant signal of type Real |
Used in Examples (1)
|
Modelica.Mechanics.MultiBody.Examples.Systems.RobotR3 Six degree of freedom robot with path planning, controllers, motors, brakes, gears and mechanics |
Extended by (1)
|
Modelica.Mechanics.MultiBody.Examples.Systems.RobotR3.Utilities Axis model of the r3 joints 1,2,3 |