WOLFRAM SYSTEM MODELER
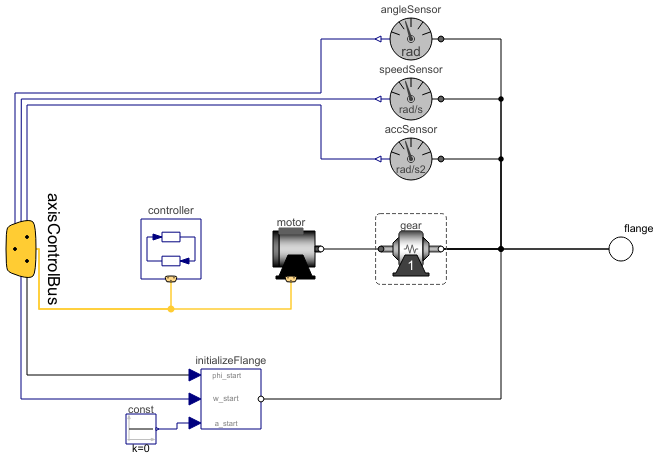
AxisType1Axis model of the r3 joints 1,2,3 |
|
Diagram
Wolfram Language
In[1]:=

SystemModel["Modelica.Mechanics.MultiBody.Examples.Systems.RobotR3.Utilities.AxisType1"]
Out[1]:=

Information
This information is part of the Modelica Standard Library maintained by the Modelica Association.
Model of axis 1, 2, 3 of the robot r3. An axis consists of a gearbox with modelled gear elasticity and bearing friction, a model of the electrical motor and a continuous-time cascade controller.
Parameters (14)
| kp |
Value: 10 Type: Real Description: Gain of position controller |
|---|---|
| ks |
Value: 1 Type: Real Description: Gain of speed controller |
| Ts |
Value: 0.01 Type: Time (s) Description: Time constant of integrator of speed controller |
| k |
Value: 1.1616 Type: Real Description: Gain of motor |
| w |
Value: 4590 Type: Real Description: Time constant of motor |
| D |
Value: 0.6 Type: Real Description: Damping constant of motor |
| J |
Value: 0.0013 Type: Inertia (kg⋅m²) Description: Moment of inertia of motor |
| ratio |
Value: -105 Type: Real Description: Gear ratio |
| Rv0 |
Value: 0.4 Type: Torque (N⋅m) Description: Viscous friction torque at zero velocity |
| Rv1 |
Value: (0.13 / 160) Type: Real (N⋅m⋅s/rad) Description: Viscous friction coefficient |
| peak |
Value: 1 Type: Real Description: Maximum static friction torque is peak*Rv0 (peak >= 1) |
| gear |
Replaceable Component Type: GearType1 Description: Motor inertia and gearbox model for r3 joints 1,2,3 |
| c |
Value: 43 Type: RotationalSpringConstant (N⋅m/rad) Description: Spring constant |
| cd |
Value: 0.005 Type: RotationalDampingConstant (N⋅m⋅s/rad) Description: Damper constant |
Connectors (2)
| flange |
Type: Flange_b Description: One-dimensional rotational flange of a shaft (non-filled circle icon) |
|
|---|---|---|
| axisControlBus |
Type: AxisControlBus Description: Data bus for one robot axis |
Components (8)
| gear |
Type: GearType1 Description: Motor inertia and gearbox model for r3 joints 1,2,3 |
|
|---|---|---|
| motor |
Type: Motor Description: Motor model including current controller of r3 motors |
|
| controller |
Type: Controller Description: P-PI cascade controller for one axis |
|
| angleSensor |
Type: AngleSensor Description: Ideal sensor to measure the absolute angle of flange |
|
| speedSensor |
Type: SpeedSensor Description: Ideal sensor to measure the absolute angular velocity of flange |
|
| accSensor |
Type: AccSensor Description: Ideal sensor to measure the absolute angular acceleration of flange |
|
| initializeFlange |
Type: InitializeFlange Description: Initializes a flange with pre-defined angle, speed and angular acceleration (usually, this is reference data from a control bus) |
|
| const |
Type: Constant Description: Generate constant signal of type Real |