WOLFRAM SYSTEM MODELER
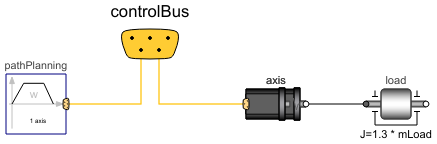
OneAxisModel of one axis of robot (controller, motor, gearbox) with simple load |
|
Diagram
Wolfram Language
In[1]:=
SystemModel["Modelica.Mechanics.MultiBody.Examples.Systems.RobotR3.OneAxis"]
Out[1]:=

Information
This information is part of the Modelica Standard Library maintained by the Modelica Association.
With this model one axis of the r3 robot is checked. The mechanical structure is replaced by a simple load inertia.
Parameters (10)
| mLoad |
Value: 15 Type: Mass (kg) Description: Mass of load |
|---|---|
| rg |
Value: 1.14 Type: Radius (m) Description: Radius of gyration of load |
| kp |
Value: 5 Type: Real Description: Gain of position controller of axis |
| ks |
Value: 0.5 Type: Real Description: Gain of speed controller of axis |
| Ts |
Value: 0.05 Type: Time (s) Description: Time constant of integrator of speed controller of axis |
| startAngle |
Value: 0 Type: Angle_deg (°) Description: Start angle of axis |
| endAngle |
Value: 120 Type: Angle_deg (°) Description: End angle of axis |
| swingTime |
Value: 0.5 Type: Time (s) Description: Additional time after reference motion is in rest before simulation is stopped |
| refSpeedMax |
Value: 3 Type: AngularVelocity (rad/s) Description: Maximum reference speed |
| refAccMax |
Value: 10 Type: AngularAcceleration (rad/s²) Description: Maximum reference acceleration |
Components (3)
| axis |
Type: AxisType1 Description: Axis model of the r3 joints 1,2,3 |
|
|---|---|---|
| load |
Type: Inertia Description: 1D-rotational component with inertia |
|
| pathPlanning |
Type: PathPlanning1 Description: Generate reference angles for fastest kinematic movement |