WOLFRAM SYSTEM MODELER
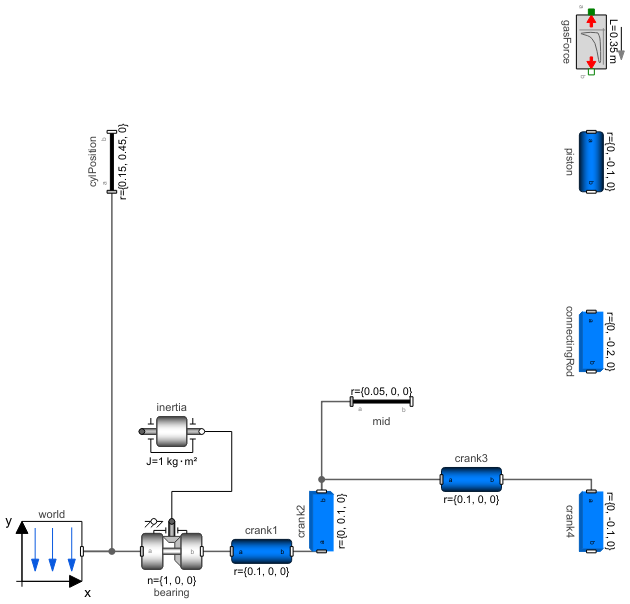
Engine1bBaseBase model for one cylinder engine with gas force |
Diagram
Wolfram Language
In[1]:=
SystemModel["Modelica.Mechanics.MultiBody.Examples.Loops.Utilities.Engine1bBase"]
Out[1]:=
Components (12)
| world |
Type: World Description: World coordinate system + gravity field + default animation definition |
|
|---|---|---|
| piston |
Type: BodyCylinder Description: Rigid body with cylinder shape. Mass and animation properties are computed from cylinder data and density (12 potential states) |
|
| connectingRod |
Type: BodyBox Description: Rigid body with box shape. Mass and animation properties are computed from box data and density (12 potential states) |
|
| bearing |
Type: Revolute Description: Revolute joint (1 rotational degree-of-freedom, 2 potential states, optional axis flange) |
|
| inertia |
Type: Inertia Description: 1D-rotational component with inertia |
|
| crank1 |
Type: BodyCylinder Description: Rigid body with cylinder shape. Mass and animation properties are computed from cylinder data and density (12 potential states) |
|
| crank2 |
Type: BodyBox Description: Rigid body with box shape. Mass and animation properties are computed from box data and density (12 potential states) |
|
| crank3 |
Type: BodyCylinder Description: Rigid body with cylinder shape. Mass and animation properties are computed from cylinder data and density (12 potential states) |
|
| crank4 |
Type: BodyBox Description: Rigid body with box shape. Mass and animation properties are computed from box data and density (12 potential states) |
|
| mid |
Type: FixedTranslation Description: Fixed translation of frame_b with respect to frame_a |
|
| cylPosition |
Type: FixedTranslation Description: Fixed translation of frame_b with respect to frame_a |
|
| gasForce |
Type: GasForce2 Description: Rough approximation of gas force in a combustion engine's cylinder |
Extended by (2)
|
Modelica.Mechanics.MultiBody.Examples.Loops Model of one cylinder engine with gas force and analytic loop handling |
|
|
Modelica.Mechanics.MultiBody.Examples.Loops Model of one cylinder engine with gas force and preparation for assembly joint JointRRP |