WOLFRAM SYSTEM MODELER
ActuatedDriveDemonstrates usage of models Rotor1D and Mounting1D |
|
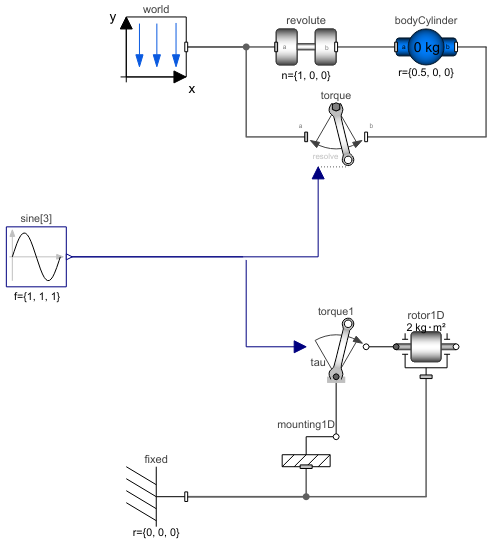
Diagram
Wolfram Language
In[1]:=

SystemModel["Modelica.Mechanics.MultiBody.Examples.Rotational3DEffects.ActuatedDrive"]
Out[1]:=

Information
This information is part of the Modelica Standard Library maintained by the Modelica Association.
This example demonstrates how to utilize the Rotor1D and Mounting1D models and compares the implementation with a standard multi-body implementation. Note, the solution with Rotor1D is much more efficient.
Components (9)
| bodyCylinder |
Type: BodyShape Description: Rigid body with mass, inertia tensor, different shapes for animation, and two frame connectors (12 potential states) |
|
|---|---|---|
| revolute |
Type: Revolute Description: Revolute joint (1 rotational degree-of-freedom, 2 potential states, optional axis flange) |
|
| world |
Type: World Description: World coordinate system + gravity field + default animation definition |
|
| torque |
Type: Torque Description: Torque acting between two frames, defined by 3 input signals and resolved in frame world, frame_a, frame_b or frame_resolve |
|
| sine |
Type: Sine[3] Description: Generate sine signal |
|
| fixed |
Type: Fixed Description: Frame fixed in the world frame at a given position |
|
| rotor1D |
Type: Rotor1D Description: 1D inertia attachable on 3-dim. bodies (3D dynamic effects are taken into account if world.driveTrainMechanics3D=true) |
|
| torque1 |
Type: Torque Description: Input signal acting as external torque on a flange |
|
| mounting1D |
Type: Mounting1D Description: Propagate 1-dim. support torque to 3-dim. system (provided world.driveTrainMechanics3D=true) |