WOLFRAM SYSTEM MODELER
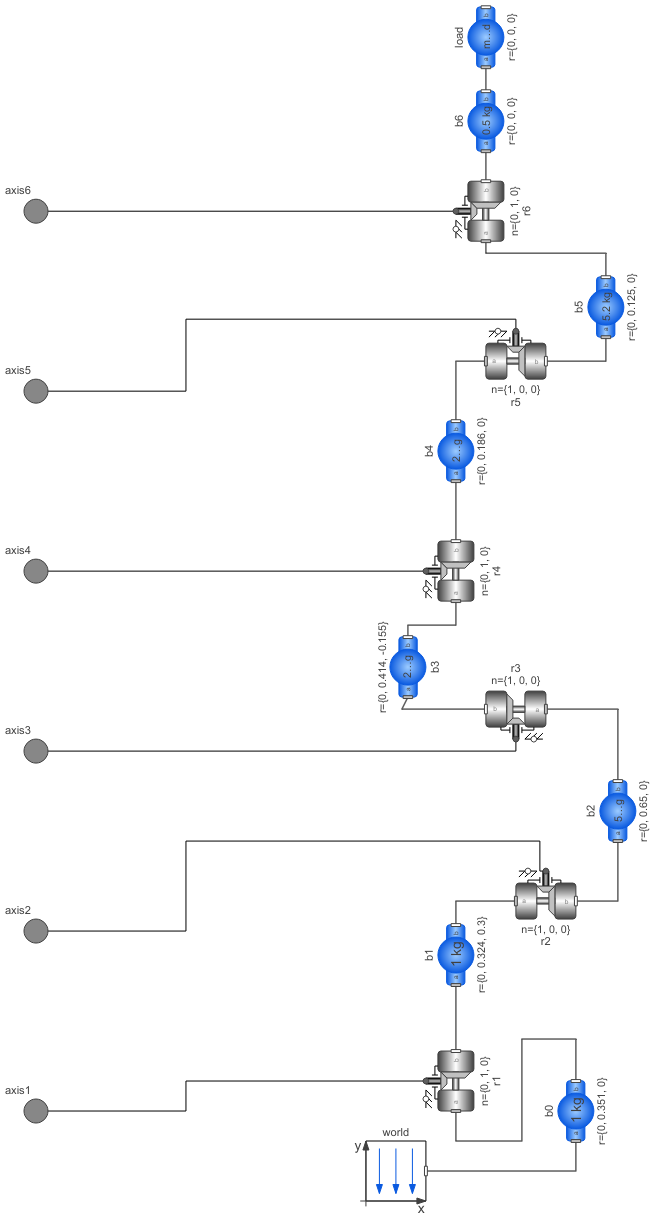
MechanicalStructureModel of the mechanical part of the r3 robot (without animation) |
|
Diagram
Wolfram Language
In[1]:=

SystemModel["Modelica.Mechanics.MultiBody.Examples.Systems.RobotR3.Components.MechanicalStructure"]
Out[1]:=
Information
This information is part of the Modelica Standard Library maintained by the Modelica Association.
This model contains the mechanical components of the r3 robot (multibody system).
Parameters (4)
| animation |
Value: true Type: Boolean Description: = true, if animation shall be enabled |
|---|---|
| mLoad |
Value: 15 Type: Mass (kg) Description: Mass of load |
| rLoad |
Value: {0, 0.25, 0} Type: Position[3] (m) Description: Distance from last flange to load mass> |
| g |
Value: 9.81 Type: Acceleration (m/s²) Description: Gravity acceleration |
Connectors (6)
Components (15)
Used in Examples (1)
|
Modelica.Mechanics.MultiBody.Examples.Systems.RobotR3 Six degree of freedom robot with path planning, controllers, motors, brakes, gears and mechanics |