WOLFRAM SYSTEM MODELER
FirstExampleA first example |
|
Wolfram Language
In[1]:=
SystemModel["PlanarMechanics.UsersGuide.Tutorial.FirstExample"]
Out[1]:=
Information
Here seveal steps will be listed to demonstrate how to build up, simulate and animate a simple pendulum, which consists of a fixed point, a planar world model, a revolute joint, a fixed translation and a body.
Building up Modelica composition diagram
The diagram is showed as following.
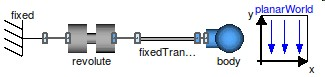
where component Fixed, Body, FixedTranslation can be found in Parts package, component Revolute in Joints, PlanarWorld directly under PlanarMechanics.
Every model having components from PlanarMechanics library must include an instance of component PlanarWorld on the highest level. The reason is that PlanarWorld component defines the default gravity for the model, includes default settings of animation parameters of almost every components.
Setting up initial values and parameters.
In this step, we only need to double click the relevant component and
write initial values and parameters in the blanks. Default gravity
force in is {0, -9.81}. In this example, phi.start
in revolute component is set to be 50°,
m and I in body are
respectively 1 kg and 0.1 kgm2; all other
settings remain default.
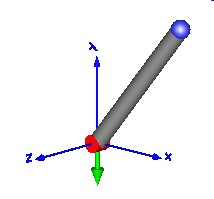
Translating and simulating the simple pendulum model.
With the above settings, animation is as following:
Revisions
 Developed 2010 at the DLR Institute of System Dynamics and Control
Developed 2010 at the DLR Institute of System Dynamics and Control