WOLFRAM SYSTEM MODELER
InternalGearApplication of a driven internal gearwheel |
|
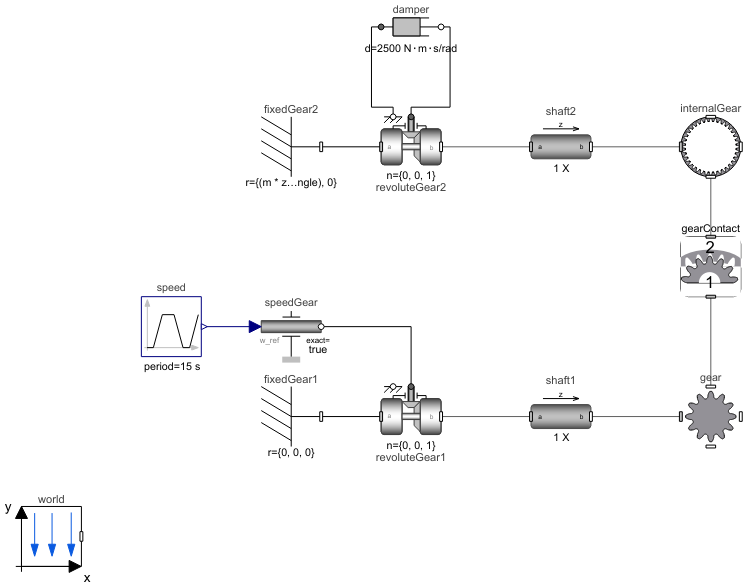
Diagram
Wolfram Language
In[1]:=
SystemModel["RotatingMachinery.Examples.Gears.SpurGears.InternalGear"]
Out[1]:=
Information
Study Internal Gear Contact Forces
This example studies the contact forces between inner and outer spur gears.
Internal gears are ideal in applications for high-power transmission within small overall dimensions, like robot arms. In Figure 1, the outer gear serves as the driver and applies torque to the inner gear (ring).
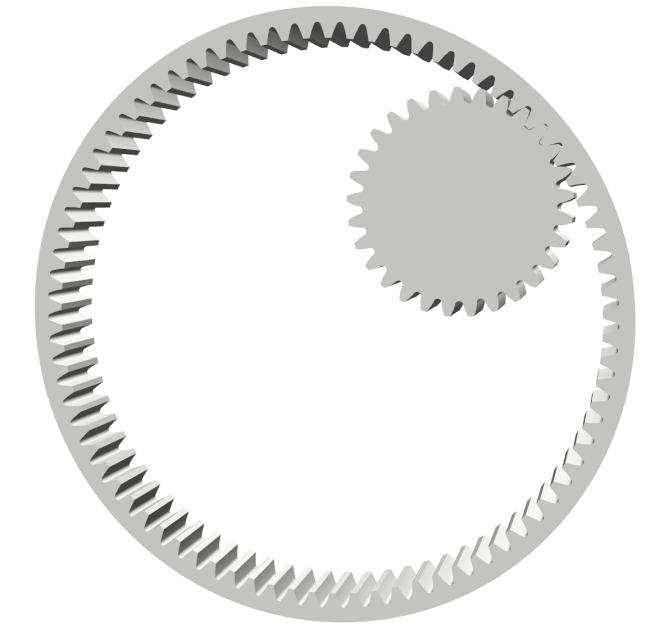
Figure 1: Internal gear.
The spurGear component can be switched to an internal gear by setting the isInnerGear to true as shown in Figure 2.
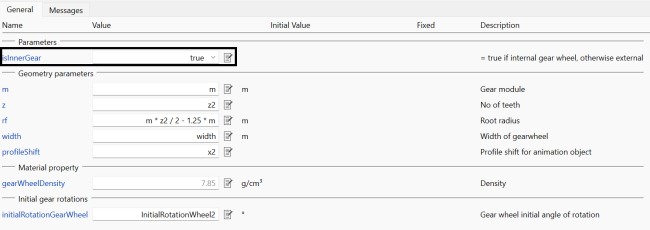
Figure 2: Gear parameter tab.
Figure 3 shows the contact forces that do not get entirely loose where the next teeth pair contacts.
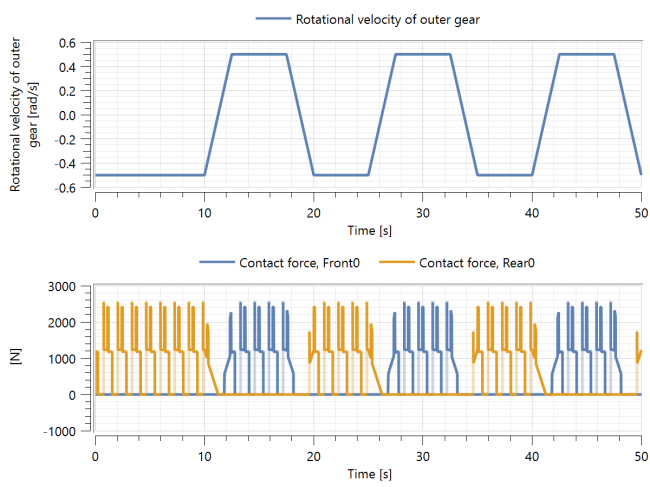
Figure 3: Contact forces.
The contact pressure on the gear tooth is shown in Figure 4. The maximum pressure is around 320 MPa, which is well below the typical maximum allowable limit for contact pressure on a gear tooth (for case-hardened gears, the maximum allowable contact pressure is typically 800–2000 MPa, while for through-hardened gears it can be 1000–2500 MPa.)
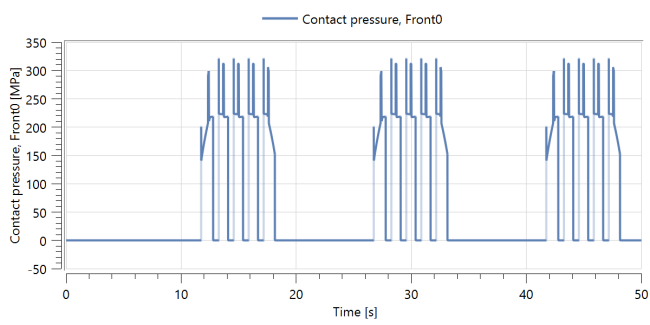
Figure 4: Contact pressure.
Parameters (11)
| m |
Value: 0.005 Type: Module (m) Description: Gear module |
|---|---|
| a |
Value: (m * z1 + m * z2) / 2 Type: Distance (m) Description: Distance from wheel center 1 to wheel center 2 |
| alpha0 |
Value: 20 * Modelica.Constants.pi / 180 Type: Angle (rad) Description: Reference profile angle |
| z1 |
Value: 29 Type: Integer Description: Number of teeth in wheel one |
| z2 |
Value: 80 Type: Integer Description: Number of teeth in wheel two |
| x1 |
Value: 0 Type: Real Description: Profile shift for gear wheel one |
| x2 |
Value: 5e-02 Type: Real Description: Profile shift for gear wheel two |
| shaftMountedAngle |
Value: Modelica.Constants.pi / 4 Type: Real Description: Angle of outer wheel in inner wheel |
| fullTurn |
Value: 360 Type: Angle_deg (°) Description: Angle in degree |
| InitialRotationWheel1 |
Value: Modelica.Units.Conversions.to_deg(shaftMountedAngle) - fullTurn / z1 * floor(shaftMountedAngle / (2 * Modelica.Constants.pi) * z1) Type: Angle_deg (°) Description: Gear wheel initial angle of rotation shaft 1 |
| InitialRotationWheel2 |
Value: Modelica.Units.Conversions.to_deg(shaftMountedAngle) - fullTurn / z2 * floor(shaftMountedAngle / (2 * Modelica.Constants.pi) * z2) Type: Angle_deg (°) Description: Gear wheel initial angle of rotation shaft 2 |
Components (13)
| world |
Type: World Description: World coordinate system + gravity field + default animation definition |
|
|---|---|---|
| fixedGear1 |
Type: Fixed Description: Frame fixed in the world frame at a given position |
|
| revoluteGear1 |
Type: Revolute Description: Revolute joint (1 rotational degree-of-freedom, 2 potential states, optional axis flange) |
|
| gear |
Type: SpurGear Description: Spur gear with mass, rotations and visualization |
|
| revoluteGear2 |
Type: Revolute Description: Revolute joint (1 rotational degree-of-freedom, 2 potential states, optional axis flange) |
|
| fixedGear2 |
Type: Fixed Description: Frame fixed in the world frame at a given position |
|
| internalGear |
Type: SpurGear Description: Spur gear with mass, rotations and visualization |
|
| speed |
Type: Trapezoid Description: Generate trapezoidal signal of type Real |
|
| speedGear |
Type: Speed Description: Forced movement of a flange according to a reference angular velocity signal |
|
| damper |
Type: Damper Description: Linear 1D rotational damper |
|
| shaft2 |
Type: CylindricalBeam Description: Class with a flexible cylindrical beam |
|
| shaft1 |
Type: CylindricalBeam Description: Class with a flexible cylindrical beam |
|
| gearContact |
Type: GearForceCalculationInner Description: Class calculating internal gear mesh contact forces |