WOLFRAM SYSTEM MODELER
ForceClass that can apply forces along x, y and z axes with a defined interval and amplitude |
|
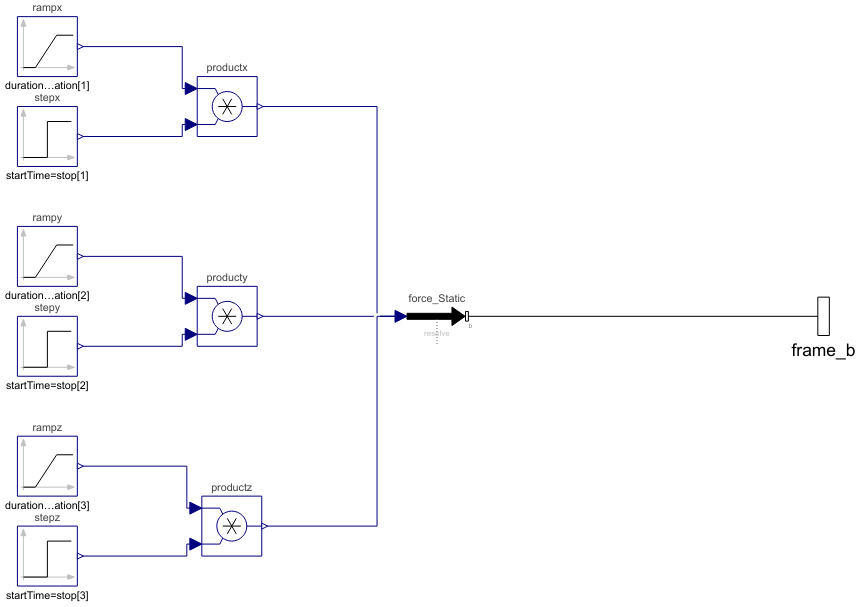
Diagram
Wolfram Language
In[1]:=
SystemModel["RotatingMachinery.Sources.Force"]
Out[1]:=

Information
Static Force
Component that can add forces in all three directions, x, y and z. The forces can be individually controlled in time interval and amplitude, defined by ramp signals. To stop applying a force, the step signal in the desired direction is activated, multiplying the force amplitude by zero.
Parameters (6)
| height |
Value: {0, 0, 0} Type: Real[3] Description: Amplitude of the force applied in x,y,z direction |
|---|---|
| start |
Value: {0, 0, 0} Type: Real[3] Description: Time when to start applying a force in x,y,z direction |
| duration |
Value: {0, 0, 0} Type: Real[3] Description: Duration of the ramp in x,y,z direciton |
| offset |
Value: {0, 0, 0} Type: Real[3] Description: Offset of amplitude in x,y,z direction |
| stop |
Value: {inf, inf, inf} Type: Real[3] Description: Time when to set force in x,y,z direction to zero |
| animation |
Value: true Type: Boolean Description: = true, if animation of force arrow should be enabled |
Connectors (1)
| frame_b |
Type: Frame_b Description: Coordinate system fixed to the component with one cut-force and cut-torque (non-filled rectangular icon) |
|---|
Components (11)
| force_Static |
Type: WorldForce Description: External force acting at frame_b, defined by 3 input signals and resolved in frame world, frame_b or frame_resolve |
|
|---|---|---|
| rampx |
Type: Ramp Description: Generate ramp signal |
|
| rampy |
Type: Ramp Description: Generate ramp signal |
|
| rampz |
Type: Ramp Description: Generate ramp signal |
|
| stepx |
Type: Step Description: Generate step signal of type Real |
|
| stepy |
Type: Step Description: Generate step signal of type Real |
|
| stepz |
Type: Step Description: Generate step signal of type Real |
|
| productx |
Type: Product Description: Output product of the two inputs |
|
| producty |
Type: Product Description: Output product of the two inputs |
|
| productz |
Type: Product Description: Output product of the two inputs |
|
| world |
Type: World Description: World coordinate system + gravity field + default animation definition |
Used in Examples (8)
|
RotatingMachinery.Examples.BearingAnalysis Study of individual roller forces |
|
|
RotatingMachinery.Examples.BearingAnalysis Two roller bearings' responses under a loaded shaft |
|
|
RotatingMachinery.Examples.BearingAnalysis Two roller bearings on flexible supports |
|
|
RotatingMachinery.Examples.BearingAnalysis Comparison bearings from a selection list |
|
|
RotatingMachinery.Examples.StabilityAnalysis Finding whirling frequencies of a rotating shaft: Part II |
|
|
RotatingMachinery.Examples.JeffcottRotorDamping Determine shaft damping |
|
|
RotatingMachinery.Examples.Shafts Inspection of an axle's vibrations |
|
|
RotatingMachinery.Examples.Shafts Inspection of a car axle deflection on tires |