WOLFRAM SYSTEM MODELER
AutopilotStateSpaceAutopilot with default setup for state space models |
|
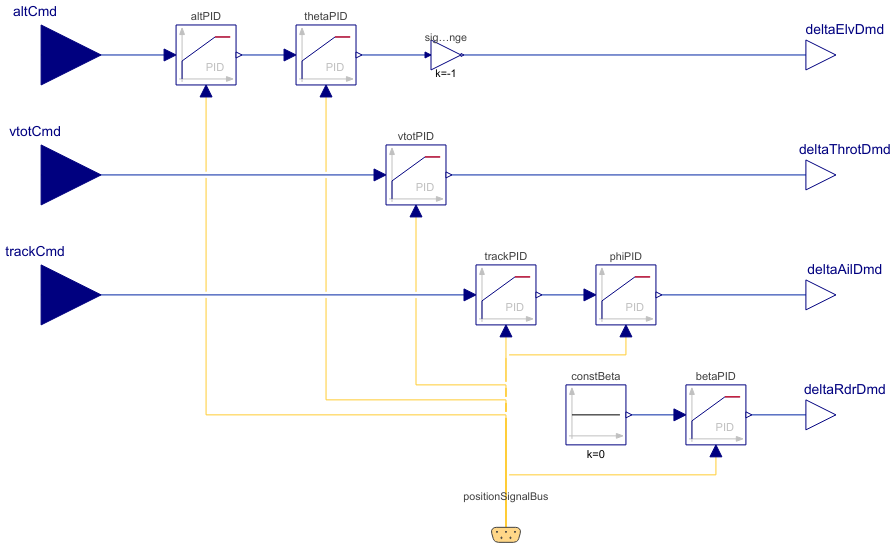
Diagram
Wolfram Language
In[1]:=
SystemModel["Aircraft.Autopilots.AutopilotStateSpace"]
Out[1]:=

Information
This autopilot model is to be used to control the flight of a state space aircraft model. The inputs for the altitude, total velocity and track angle commands are translated into control actuator perturbations from the reference flight conditions with the LimPID controllers. The rudder is not controlled by an input command but with a constant signal for zero sideslip angle. Feedback from the state space aircraft model is an input to this model through the positionSignalBus connector.
The architecture used in this autopilot is similar to the one used in AutopilotBase, where it is described in more detail.
Parameters (24)
| elvControl |
Value: true Type: Boolean Description: true, if elevator is controlled |
|---|---|
| throtControl |
Value: true Type: Boolean Description: true, if throttle is controlled |
| ailControl |
Value: true Type: Boolean Description: true, if ailerons are controlled |
| rdrControl |
Value: true Type: Boolean Description: true, if rudder is controlled |
| maxPhi |
Value: 0.349065850398866 Type: Angle (rad) Description: Maximum roll angle |
| maxTheta |
Value: 0.349065850398866 Type: Angle (rad) Description: Maximum pitch angle |
| altPIDk |
Value: 0.0075 Type: Real Description: Altitude PID Gain |
| altPIDTi |
Value: 50 Type: Time (s) Description: Altitude PID Integrator Block |
| altPIDTd |
Value: 5 Type: Time (s) Description: Altitude PID Derivative Block |
| thetaPIDk |
Value: 0.5 Type: Real Description: Theta PID Gain |
| thetaPIDTi |
Value: 15 Type: Time (s) Description: Theta PID Integrator Block |
| thetaPIDTd |
Value: 0.5 Type: Time (s) Description: Theta PID Derivative Block |
| vtotPIDk |
Value: 2 Type: Real Description: Velocity PID Gain |
| vtotPIDTi |
Value: 2 Type: Time (s) Description: Velocity PID Integrator Block |
| vtotPIDTd |
Value: 0.5 Type: Time (s) Description: Velocity PID Derivative Block |
| trackPIDk |
Value: 2 Type: Real Description: Track PID Gain |
| trackPIDTi |
Value: 100 Type: Time (s) Description: Track PID Integrator Block |
| trackPIDTd |
Value: 5 Type: Time (s) Description: Track PID Derivative Block |
| phiPIDk |
Value: 0.75 Type: Real Description: Phi PID Gain |
| phiPIDTi |
Value: 20 Type: Time (s) Description: Phi PID Integrator Block |
| phiPIDTd |
Value: 2 Type: Time (s) Description: Phi PID Derivative Block |
| betaPIDk |
Value: 1 Type: Real Description: Beta PID Gain |
| betaPIDTi |
Value: 2 Type: Time (s) Description: Beta PID Integrator Block |
| betaPIDTd |
Value: 0.75 Type: Time (s) Description: Beta PID Derivative Block |
Connectors (8)
| deltaElvDmd |
Type: RealOutput Description: Demand for elevator deflection perturbation |
|
|---|---|---|
| deltaThrotDmd |
Type: RealOutput Description: Demand for throttle position perturbation |
|
| deltaAilDmd |
Type: RealOutput Description: Demand for aileron deflection perturbation |
|
| deltaRdrDmd |
Type: RealOutput Description: Demand for rudder deflection perturbation |
|
| altCmd |
Type: RealInput Description: Altitude command |
|
| vtotCmd |
Type: RealInput Description: Total velocity command |
|
| trackCmd |
Type: RealInput Description: Track command |
|
| positionSignalBus |
Type: PositionSignalBus Description: Input for aircraft motion, position and orientation data |
Components (8)
| altPID |
Type: LimPID Description: P, PI, PD, and PID controller with limited output, anti-windup compensation, setpoint weighting and optional feed-forward |
|
|---|---|---|
| vtotPID |
Type: LimPID Description: P, PI, PD, and PID controller with limited output, anti-windup compensation, setpoint weighting and optional feed-forward |
|
| trackPID |
Type: LimPID Description: P, PI, PD, and PID controller with limited output, anti-windup compensation, setpoint weighting and optional feed-forward |
|
| betaPID |
Type: LimPID Description: P, PI, PD, and PID controller with limited output, anti-windup compensation, setpoint weighting and optional feed-forward |
|
| phiPID |
Type: LimPID Description: P, PI, PD, and PID controller with limited output, anti-windup compensation, setpoint weighting and optional feed-forward |
|
| thetaPID |
Type: LimPID Description: P, PI, PD, and PID controller with limited output, anti-windup compensation, setpoint weighting and optional feed-forward |
|
| signChange |
Type: Gain Description: Output the product of a gain value with the input signal |
|
| constBeta |
Type: Constant Description: Generate constant signal of type Real |
Used in Examples (1)
|
Aircraft.Examples Example for demonstrating the linearized state space modeling environment |