WOLFRAM SYSTEM MODELER
MotorElectric motor, converting electrical energy to the mechanical torque |
|
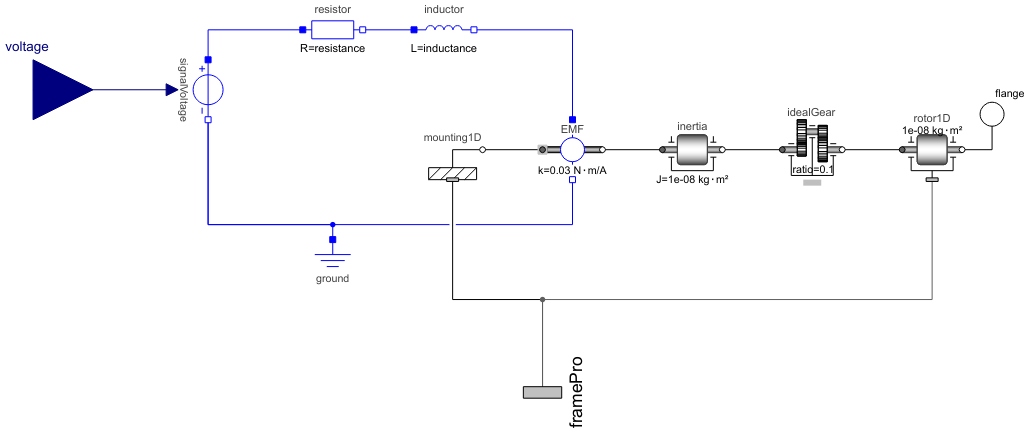
Diagram
Wolfram Language
In[1]:=
SystemModel["Aircraft.Physical.RotaryWing.MultiRotor.Parts.Propulsions.Motor"]
Out[1]:=
Information
The motor component converts input voltage into both rotation speed and torque. The electric circuit, comprising a resistor, inductor and electromotive force (EMF), transforms electrical energy into rotational mechanical energy. The rotor is employed to generate gyroscopic torque, and the resulting rotation speed is connected to the flange. Utilizing the 1D mounting, support torque is obtained from a one-dimensional rotational mechanical system and transferred to a carrier body—in this case, the quadrotor propeller.
Parameters (2)
| resistance |
Value: 2.25 Type: Resistance (Ω) Description: Resistance at temperature T_ref (resistor.R) |
|---|---|
| inductance |
Value: 0.01 Type: Inductance (H) Description: Inductance (inductor.L) |
Connectors (3)
Components (9)
| resistor |
Type: Resistor Description: Linear electrical resistor |
|
|---|---|---|
| inductor |
Type: Inductor Description: Linear electrical inductor |
|
| EMF |
Type: RotationalEMF Description: Transforms electrical energy into rotational mechanical energy |
|
| ground |
Type: Ground Description: Ground node |
|
| signalVoltage |
Type: SignalVoltage Description: Source voltage |
|
| inertia |
Type: Inertia Description: 1D rotational component with inertia |
|
| mounting1D |
Type: Mounting1D Description: Mounting 1D rotational torque on a 3D body |
|
| rotor1D |
Type: Rotor1D Description: Modeling the gyroscopic torques exerted by a 1D inertia (so-called rotor) on all of its three dimensions. |
|
| idealGear |
Type: IdealGear Description: Ideal gear without inertia changing rotation speed |
Used in Components (1)
|
Aircraft.Physical.RotaryWing.MultiRotor Interface for the complete quadrotor model |