WOLFRAM SYSTEM MODELER
QuadrotorInterface for the complete quadrotor model |
|
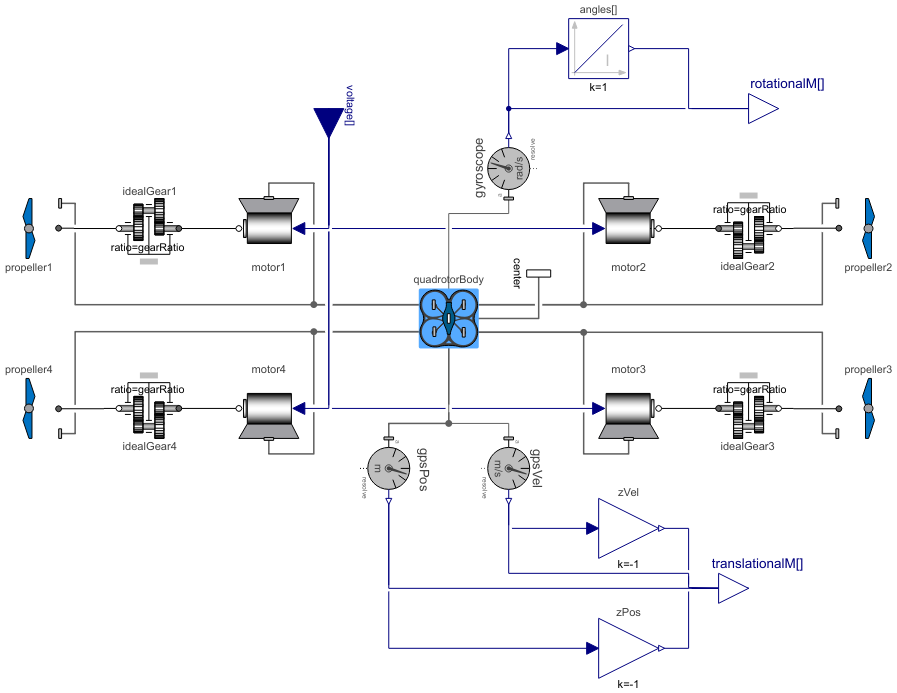
Diagram
Wolfram Language
In[1]:=
SystemModel["Aircraft.Physical.RotaryWing.MultiRotor.Quadrotor"]
Out[1]:=
Information
The Quadrotor model represents the complete drone model, consisting of the QuadrotorBody (representing mass and inertia of the drone), sensors and propulsion system (including DC motor, gear and propeller). It takes input commands from the controller, and the outputs of the model are the translational and rotational position/angle and velocities.
Parameters
The Quadrotor model declares the primary parameters that significantly influence quadrotor design. This declaration is intended to simplify the process of parameter adjustments, making it easier to modify key aspects of the quadrotor's design.
Propulsion System
The propulsion system consists of an electric motor that generates the required torques mounted on each propulsion system inside the QuadrotorBody model, and each one is connected to a gearbox that scales the torques to the propellers. The propeller produces lift force for each propulsive body and the DC motor generates angular rotation. Force and torque signals are introduced in QuadrotorBody and mounted on each corresponding propulsion system.
System Inputs
The inputs to the system consist of the voltages for the four DC motors, and these voltages are determined by the controllers.
Sensors:
Two Sensors from the Modelica standard library has been used for this model. An AbsoluteVelocity (named gpsVel) and an AbsolutePosition (gpsPos) sensor are connected to the frame of the center of the QuadrotorBody. They measure the linear velocity and position of the quadrotor in the Earth's reference frame. Note that negative gain (zVel and zPos) are used to change the direction of the position and velocity in the z direction to be in accordance with the world reference frame of the Aircraft library. All measurements pass to the output translationalM which is a vector of [ x, y, z, u, v, w].
An AbsoluteAngularVelocity sensor is connected to the same frame and models a gyroscope. It records angular velocities in the quadrotor's body reference frame, denoted as p, q and r, and corresponding to rotations around the x, y and z axes. By applying an integrator, the quadrotor's rotational angles, roll, pitch and yaw can be derived. Taking into account the small angle assumption, these angles are equivalent to the Euler angles, φ, θ and ψ. All measurements pass to the output rotationalM which is a vector of [roll, pitch, yaw, p, q, r].
Connectors
This model contains real inputs for the commanded voltage from the control system, and two real outputs from the translational and rotational sensor measurement, which is used as feedback to the control system. The drone features a frame connector located at its center of mass. This connector enables the attachment of loads for package delivery or the connection of mechanical components, as illustrated in the VerticalMotion example.
Parameters (13)
| centralMass |
Value: 0.38 Type: Mass (kg) Description: Mass of rigid body (bodyCenter.m) (quadrotorBody.centralMass) |
|---|---|
| propulsionMass |
Value: 0.01 Type: Mass (kg) Description: Mass of each propulsion system (quadrotorBody.propulsionMass) |
| IxxP |
Value: 0.001 Type: Inertia (kg⋅m²) Description: Moment of inertia of each propulsion system around x axis (quadrotorBody.IxxP) |
| IyyP |
Value: 0.001 Type: Inertia (kg⋅m²) Description: Moment of inertia of each propulsion system around y axis (quadrotorBody.IyyP) |
| IzzP |
Value: 0.001 Type: Inertia (kg⋅m²) Description: Moment of inertia of each propulsion system around z axis (quadrotorBody.IzzP) |
| IxxC |
Value: 0.01 Type: Inertia (kg⋅m²) Description: Moment of inertia of the central mass of the quadrotor around x axis (quadrotorBody.IxxC) |
| IyyC |
Value: 0.01 Type: Inertia (kg⋅m²) Description: Moment of inertia of the central mass of the quadrotor around y axis (quadrotorBody.IyyC) |
| IzzC |
Value: 0.01 Type: Inertia (kg⋅m²) Description: Moment of inertia of the central mass of the quadrotor around z axis (quadrotorBody.IzzC) |
| armLength |
Value: 0.192 Type: Real Description: Arm length of the quadrotor (quadrotorBody.armLength) |
| propellerGain |
Value: 0.00045 Type: Real Description: Relation between lift force of propeller and rpm (propeller2.p) |
| gearRatio |
Value: 28000.0 / 3300.0 Type: Real Description: Transmission ratio (flange_a.phi/flange_b.phi) (idealGear2.ratio) |
| motorResistance |
Value: 2.25 Type: Resistance (Ω) Description: Resistance at temperature T_ref (resistor.R) (motor1.resistance) |
| motorInductance |
Value: 0.01 Type: Inductance (H) Description: Inductance (inductor.L) (motor1.inductance) |
Connectors (4)
| voltage |
Type: RealInput[4] Description: Vector of the voltage input of the electric motors |
|
|---|---|---|
| center |
Type: Frame_b Description: Coordinate system fixed to the component with one cut-force and cut-torque (non-filled rectangular icon) |
|
| translationalM |
Type: RealOutput[6] Description: Measured position of the quadrotor |
|
| rotationalM |
Type: RealOutput[6] Description: Measured angles and angular rates of the quadrotor |
Components (19)
| quadrotorBody |
Type: QuadrotorBody Description: 6DOF quadrotor base body |
|
|---|---|---|
| motor3 |
Type: Motor Description: Third electric motor |
|
| motor1 |
Type: Motor Description: First electric motor |
|
| motor2 |
Type: Motor Description: Second electric motor |
|
| propeller3 |
Type: Propeller Description: Third propeller generates force and rotor rotation |
|
| propeller2 |
Type: Propeller Description: Second propeller generates force and rotor rotation |
|
| propeller1 |
Type: Propeller Description: First propeller generates force and rotor rotation |
|
| idealGear2 |
Type: IdealGear Description: Second gear |
|
| idealGear3 |
Type: IdealGear Description: Third gear |
|
| idealGear1 |
Type: IdealGear Description: First gear |
|
| gpsVel |
Type: AbsoluteVelocity Description: Sensor to measure absolute position of the quadrotor |
|
| gyroscope |
Type: AbsoluteAngularVelocity Description: Sensor measures the angular velocity of the quadrotor |
|
| idealGear4 |
Type: IdealGear Description: Fourth gear |
|
| motor4 |
Type: Motor Description: Fourth electric motor |
|
| propeller4 |
Type: Propeller Description: Fourth propeller generates force and rotor rotation |
|
| angles |
Type: Integrator[3] Description: Output the integral of the input signal with optional reset |
|
| gpsPos |
Type: AbsolutePosition Description: Measure absolute position vector of the origin of a frame connector |
|
| zPos |
Type: Gain Description: Gain converts the height measurement direction |
|
| zVel |
Type: Gain Description: Gain converts the height measurement direction |
Used in Examples (3)
|
Aircraft.Examples Vertical motion of quadrotor system in 3DOF, constrained in z axis |
|
|
Aircraft.Examples Circular path tracking by a quadrotor |
|
|
Aircraft.Examples Compare the impact of two types of controller structures on the motion of the quadrotor |