WOLFRAM SYSTEM MODELER
JoystickJointTwo degree-of-freedom joystick joint |
|
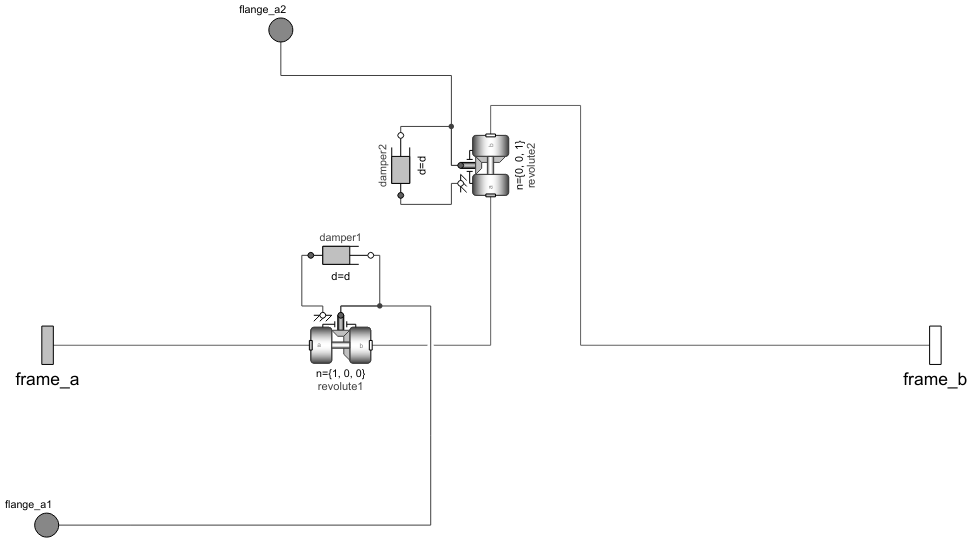
Diagram
Wolfram Language
In[1]:=

SystemModel["EducationExamples.MechanicalEngineering.Joystick.Components.JoystickJoint"]
Out[1]:=
Information
This component models a two-degree-of-freedom joystick joint.
Parameters (3)
| d |
Type: RotationalDampingConstant (N⋅m⋅s/rad) Description: Damping constant |
|---|---|
| initialxangle |
Value: 0 Type: Angle (rad) |
| initialyangle |
Value: 0 Type: Angle (rad) |
Connectors (4)
| flange_a1 |
Type: Flange_a Description: One-dimensional rotational flange of a shaft (filled circle icon) |
|
|---|---|---|
| flange_a2 |
Type: Flange_a Description: One-dimensional rotational flange of a shaft (filled circle icon) |
|
| frame_b |
Type: Frame_b Description: Coordinate system fixed to the component with one cut-force and cut-torque (non-filled rectangular icon) |
|
| frame_a |
Type: Frame_a Description: Coordinate system fixed to the component with one cut-force and cut-torque (filled rectangular icon) |
Components (4)
| revolute1 |
Type: Revolute Description: Revolute joint (1 rotational degree-of-freedom, 2 potential states, optional axis flange) |
|
|---|---|---|
| revolute2 |
Type: Revolute Description: Revolute joint (1 rotational degree-of-freedom, 2 potential states, optional axis flange) |
|
| damper1 |
Type: Damper Description: Linear 1D rotational damper |
|
| damper2 |
Type: Damper Description: Linear 1D rotational damper |
Used in Examples (2)
|
EducationExamples.MechanicalEngineering.Joystick Model simulating response of three joystick designs to circularly varying test force |
|
|
EducationExamples.MechanicalEngineering.Joystick Model simulating response of three joystick designs to circularly varying test force |