WOLFRAM SYSTEM MODELER
LinearActuatorIdealized linear actuator with proportional controller |
|
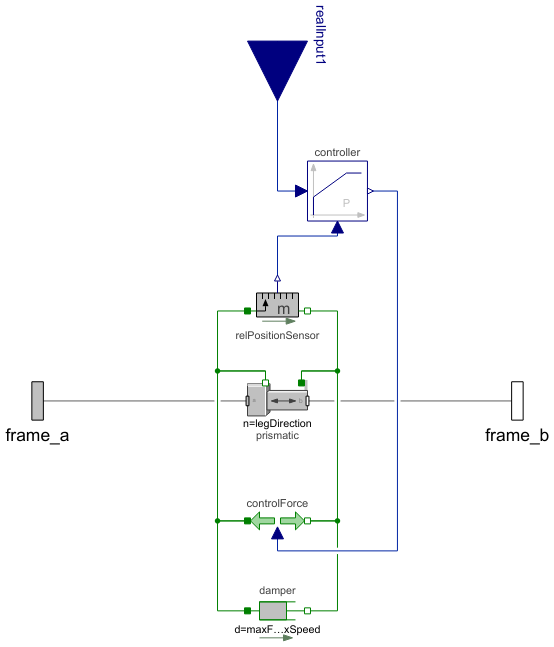
Diagram
Wolfram Language
In[1]:=

SystemModel["IndustryExamples.IndustrialManufacturing.StewartPlatform.Components.LinearActuator"]
Out[1]:=
Information
This component models an idealized linear actuator with a proportional controller.
Parameters (6)
Connectors (3)
| frame_a |
Type: Frame_a Description: Coordinate system fixed to the component with one cut-force and cut-torque (filled rectangular icon) |
|
|---|---|---|
| realInput1 |
Type: RealInput Description: 'input Real' as connector |
|
| frame_b |
Type: Frame_b Description: Coordinate system fixed to the component with one cut-force and cut-torque (non-filled rectangular icon) |
Components (5)
| prismatic |
Type: Prismatic Description: Prismatic joint (1 translational degree-of-freedom, 2 potential states, optional axis flange) |
|
|---|---|---|
| controlForce |
Type: Force2 Description: Input signal acting as force on two flanges |
|
| relPositionSensor |
Type: RelPositionSensor Description: Ideal sensor to measure the relative position between two flanges |
|
| controller |
Type: LimPID Description: P, PI, PD, and PID controller with limited output, anti-windup compensation, setpoint weighting and optional feed-forward |
|
| damper |
Type: Damper Description: Linear 1D translational damper |
Used in Components (1)
|
IndustryExamples.IndustrialManufacturing.StewartPlatform.Components Six-degree-of-freedom leg with controlled length |