WOLFRAM SYSTEM MODELER
AIM_SlipRingAsynchronous induction machine with slipring rotor |
|
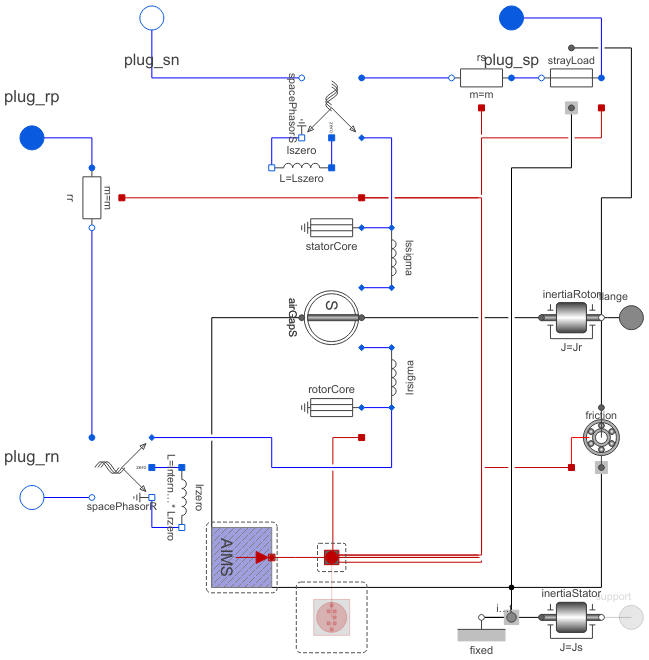
Diagram
Wolfram Language
In[1]:=

SystemModel["Modelica.Electrical.Machines.BasicMachines.AsynchronousInductionMachines.AIM_SlipRing"]
Out[1]:=
Information
This information is part of the Modelica Standard Library maintained by the Modelica Association.
Model of a three phase asynchronous induction machine with slipring rotor.
Resistance and stray inductance of stator and rotor are modeled directly in stator respectively rotor phases, then using space phasor transformation and a stator-fixed AirGap model. The machine models take the following loss effects into account:
- heat losses in the temperature dependent stator winding resistances
- heat losses in the temperature dependent rotor winding resistances
- friction losses
- core losses (only eddy current losses, no hysteresis losses)
- stray load losses
Default values for machine's parameters (a realistic example) are:
| number of pole pairs p | 2 | |
| stator's moment of inertia | 0.29 | kg.m2 |
| rotor's moment of inertia | 0.29 | kg.m2 |
| nominal frequency fNominal | 50 | Hz |
| nominal voltage per phase | 100 | V RMS |
| nominal current per phase | 100 | A RMS |
| nominal torque | 161.4 | Nm |
| nominal speed | 1440.45 | rpm |
| nominal mechanical output | 24.346 | kW |
| efficiency | 92.7 | % |
| power factor | 0.875 | |
| stator resistance | 0.03 | Ohm per phase at reference temperature |
| reference temperature TsRef | 20 | °C |
| temperature coefficient alpha20s | 0 | 1/K |
| rotor resistance | 0.04 | Ohm per phase at reference temperature |
| reference temperature TrRef | 20 | °C |
| temperature coefficient alpha20r | 0 | 1/K |
| stator reactance Xs | 3 | Ohm per phase |
| rotor reactance Xr | 3 | Ohm per phase |
| total stray coefficient sigma | 0.0667 | |
| turnsRatio | 1 | effective ratio of stator and rotor current |
| stator operational temperature TsOperational | 20 | °C |
| rotor operational temperature TrOperational | 20 | °C |
| These values give the following inductances: | ||
| stator stray inductance per phase | Xs * (1 - sqrt(1-sigma))/(2*pi*fNominal) | |
| rotor stray inductance | Xr * (1 - sqrt(1-sigma))/(2*pi*fNominal) | |
| main field inductance per phase | sqrt(Xs*Xr * (1-sigma))/(2*pi*f) |
Parameter turnsRatio could be obtained from the following relationship
at standstill with open rotor circuit at nominal voltage and nominal frequency,
using the locked-rotor voltage VR, no-load stator current I0 and powerfactor PF0:
turnsRatio * VR = Vs - (Rs + j Xs,sigma) I0
Parameters (27)
| Jr |
Value: Type: Inertia (kg·m²) Description: Rotor's moment of inertia |
|---|---|
| useSupport |
Value: false Type: Boolean Description: Enable / disable (=fixed stator) support |
| Js |
Value: Jr Type: Inertia (kg·m²) Description: Stator's moment of inertia |
| useThermalPort |
Value: false Type: Boolean Description: Enable / disable (=fixed temperatures) thermal port |
| frictionParameters |
Value: Type: FrictionParameters Description: Friction loss parameter record |
| p |
Value: Type: Integer Description: Number of pole pairs (Integer) |
| fsNominal |
Value: Type: Frequency (Hz) Description: Nominal frequency |
| TsOperational |
Value: Type: Temperature (K) Description: Operational temperature of stator resistance |
| Rs |
Value: Type: Resistance (Ω) Description: Stator resistance per phase at TRef |
| TsRef |
Value: Type: Temperature (K) Description: Reference temperature of stator resistance |
| alpha20s |
Value: Type: LinearTemperatureCoefficient20 (1/K) Description: Temperature coefficient of stator resistance at 20 degC |
| Lszero |
Value: Lssigma Type: Inductance (H) Description: Stator zero sequence inductance |
| Lssigma |
Value: Type: Inductance (H) Description: Stator stray inductance per phase |
| statorCoreParameters |
Value: Type: CoreParameters Description: Stator core loss parameter record; all parameters refer to stator side |
| strayLoadParameters |
Value: Type: StrayLoadParameters Description: Stray load loss parameter record |
| Lm |
Value: Type: Inductance (H) Description: Stator main field inductance per phase |
| Lrsigma |
Value: Type: Inductance (H) Description: Rotor stray inductance per phase w.r.t. rotor side |
| Lrzero |
Value: Lrsigma Type: Inductance (H) Description: Rotor zero sequence inductance w.r.t. rotor side |
| Rr |
Value: Type: Resistance (Ω) Description: Rotor resistance per phase at TRef w.r.t. rotor side |
| TrRef |
Value: Type: Temperature (K) Description: Reference temperature of rotor resistance |
| alpha20r |
Value: Type: LinearTemperatureCoefficient20 (1/K) Description: Temperature coefficient of rotor resistance at 20 degC |
| useTurnsRatio |
Value: Type: Boolean Description: Use turnsRatio or calculate from locked-rotor voltage? |
| turnsRatio |
Value: Type: Real Description: Effective number of stator turns / effective number of rotor turns |
| VsNominal |
Value: Type: Voltage (V) Description: Nominal stator voltage per phase |
| VrLockedRotor |
Value: Type: Voltage (V) Description: Locked-rotor voltage per phase |
| TrOperational |
Value: Type: Temperature (K) Description: Operational temperature of rotor resistance |
| rotorCoreParameters |
Value: Type: CoreParameters Description: Rotor core loss parameter record; all parameters refer to rotor side |
Inputs (4)
| idq_ss |
Default Value: airGapS.i_ss Type: Current[2] (A) Description: Stator space phasor current / stator fixed frame |
|---|---|
| idq_sr |
Default Value: airGapS.i_sr Type: Current[2] (A) Description: Stator space phasor current / rotor fixed frame |
| idq_rs |
Default Value: airGapS.i_rs Type: Current[2] (A) Description: Rotor space phasor current / stator fixed frame |
| idq_rr |
Default Value: airGapS.i_rr Type: Current[2] (A) Description: Rotor space phasor current / rotor fixed frame |
Outputs (11)
| phiMechanical |
Default Value: flange.phi - internalSupport.phi Type: Angle (rad) Description: Mechanical angle of rotor against stator |
|---|---|
| wMechanical |
Default Value: der(phiMechanical) Type: AngularVelocity (rad/s) Description: Mechanical angular velocity of rotor against stator |
| tauElectrical |
Default Value: inertiaRotor.flange_a.tau Type: Torque (N·m) Description: Electromagnetic torque |
| tauShaft |
Default Value: -flange.tau Type: Torque (N·m) Description: Shaft torque |
| powerBalance |
Type: PowerBalanceAIMS Description: Power balance |
| vs |
Default Value: plug_sp.pin.v - plug_sn.pin.v Type: Voltage[m] (V) Description: Stator instantaneous voltages |
| is |
Default Value: plug_sp.pin.i Type: Current[m] (A) Description: Stator instantaneous currents |
| i_0_s |
Default Value: spacePhasorS.zero.i Type: Current (A) Description: Stator zero-sequence current |
| i_0_r |
Default Value: spacePhasorR.zero.i Type: Current (A) Description: Rotor zero-sequence current |
| vr |
Default Value: plug_rp.pin.v - plug_rn.pin.v Type: Voltage[m] (V) Description: Rotor instantaneous voltages |
| ir |
Default Value: plug_rp.pin.i Type: Current[m] (A) Description: Rotor instantaneous currents |
Connectors (9)
| flange |
Type: Flange_a Description: Shaft |
|
|---|---|---|
| support |
Type: Flange_a Description: Support at which the reaction torque is acting |
|
| internalSupport |
Type: Support |
|
| plug_sp |
Type: PositivePlug Description: Positive stator plug |
|
| plug_sn |
Type: NegativePlug Description: Negative stator plug |
|
| thermalPort |
Type: ThermalPortAIMS |
|
| internalThermalPort |
Type: ThermalPortAIMS |
|
| plug_rp |
Type: PositivePlug Description: Positive rotor plug |
|
| plug_rn |
Type: NegativePlug Description: Negative rotor plug |
Components (22)
| frictionParameters |
Type: FrictionParameters Description: Friction loss parameter record |
|
|---|---|---|
| inertiaRotor |
Type: Inertia |
|
| inertiaStator |
Type: Inertia |
|
| fixed |
Type: Fixed |
|
| friction |
Type: Friction |
|
| statorCoreParameters |
Type: CoreParameters Description: Stator core loss parameter record; all parameters refer to stator side |
|
| strayLoadParameters |
Type: StrayLoadParameters Description: Stray load loss parameter record |
|
| powerBalance |
Type: PowerBalanceAIMS Description: Power balance |
|
| rs |
Type: Resistor |
|
| lssigma |
Type: Inductor |
|
| lszero |
Type: Inductor |
|
| statorCore |
Type: Core |
|
| spacePhasorS |
Type: SpacePhasor |
|
| strayLoad |
Type: StrayLoad |
|
| thermalAmbient |
Type: ThermalAmbientAIMS |
|
| airGapS |
Type: AirGapS |
|
| rotorCoreParameters |
Type: CoreParameters Description: Rotor core loss parameter record; all parameters refer to rotor side |
|
| spacePhasorR |
Type: SpacePhasor |
|
| rr |
Type: Resistor |
|
| lrsigma |
Type: Inductor |
|
| lrzero |
Type: Inductor |
|
| rotorCore |
Type: Core |
Used in Examples (2)
|
Modelica.Electrical.Machines.Examples.AsynchronousInductionMachines Test example: AsynchronousInductionMachineSlipRing |
|
|
Modelica.Magnetic.FundamentalWave.Examples.BasicMachines Starting of asynchronous induction machine with slip rings |