WOLFRAM SYSTEM MODELER
CylinderCylinder type |
|
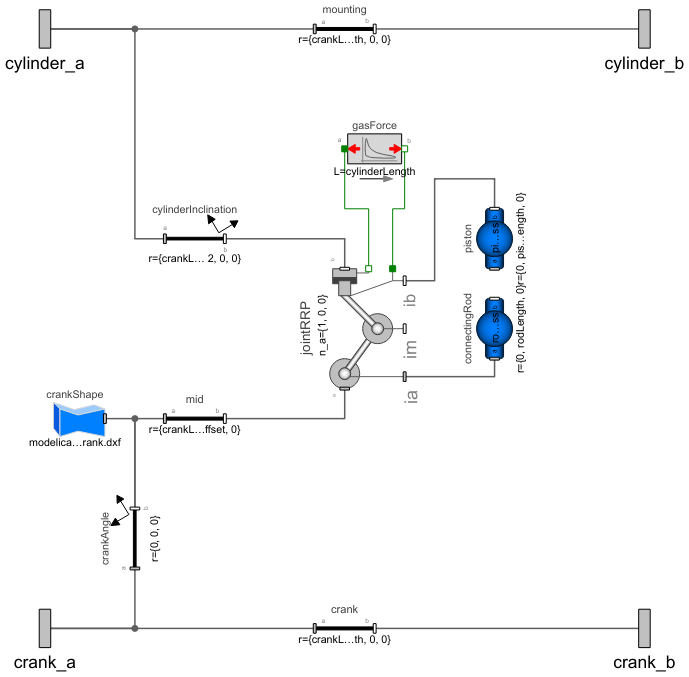
Diagram
Wolfram Language
In[1]:=

SystemModel["Modelica.Mechanics.MultiBody.Examples.Loops.Utilities.EngineV6_analytic.Cylinder"]
Out[1]:=
Information
This information is part of the Modelica Standard Library maintained by the Modelica Association.
Model of one cylinder of an engine with analytic loop handling of the slider crank mechanism.
Parameters (20)
| animation |
Value: true Type: Boolean Description: = true, if animation shall be enabled |
|---|---|
| cylinderTopPosition |
Value: 0.42 Type: Length (m) Description: Length from crank shaft to end of cylinder. |
| crankLength |
Value: 0.14 Type: Length (m) Description: Length of crank shaft in x direction |
| crankPinOffset |
Value: 0.05 Type: Length (m) Description: Offset of crank pin from center axis |
| crankPinLength |
Value: 0.1 Type: Length (m) Description: Offset of crank pin from center axis |
| cylinderInclinationAngle |
Value: 0 Type: Angle_deg (°) Description: Inclination of cylinder |
| crankAngleOffset |
Value: 0 Type: Angle_deg (°) Description: Offset for crank angle |
| pistonLength |
Value: 0.1 Type: Length (m) Description: Length of cylinder |
| pistonCenterOfMass |
Value: pistonLength / 2 Type: Length (m) Description: Distance from frame_a to center of mass of piston |
| pistonMass |
Value: 6 Type: Mass (kg) Description: Mass of piston |
| pistonInertia_11 |
Value: 0.0088 Type: Inertia (kg⋅m²) Description: Inertia 11 of piston with respect to center of mass frame, parallel to frame_a |
| pistonInertia_22 |
Value: 0.0076 Type: Inertia (kg⋅m²) Description: Inertia 22 of piston with respect to center of mass frame, parallel to frame_a |
| pistonInertia_33 |
Value: 0.0088 Type: Inertia (kg⋅m²) Description: Inertia 33 of piston with respect to center of mass frame, parallel to frame_a |
| rodLength |
Value: 0.175 Type: Length (m) Description: Length of rod |
| rodCenterOfMass |
Value: rodLength / 2 Type: Length (m) Description: Distance from frame_a to center of mass of piston |
| rodMass |
Value: 1 Type: Mass (kg) Description: Mass of rod |
| rodInertia_11 |
Value: 0.006 Type: Inertia (kg⋅m²) Description: Inertia 11 of rod with respect to center of mass frame, parallel to frame_a |
| rodInertia_22 |
Value: 0.0005 Type: Inertia (kg⋅m²) Description: Inertia 22 of rod with respect to center of mass frame, parallel to frame_a |
| rodInertia_33 |
Value: 0.006 Type: Inertia (kg⋅m²) Description: Inertia 33 of rod with respect to center of mass frame, parallel to frame_a |
| cylinderLength |
Value: cylinderTopPosition - (pistonLength + rodLength - crankPinOffset) Type: Length (m) Description: Maximum length of cylinder volume |
Connectors (4)
| cylinder_a |
Type: Frame_a Description: Coordinate system fixed to the component with one cut-force and cut-torque (filled rectangular icon) |
|
|---|---|---|
| cylinder_b |
Type: Frame_a Description: Coordinate system fixed to the component with one cut-force and cut-torque (filled rectangular icon) |
|
| crank_a |
Type: Frame_a Description: Coordinate system fixed to the component with one cut-force and cut-torque (filled rectangular icon) |
|
| crank_b |
Type: Frame_a Description: Coordinate system fixed to the component with one cut-force and cut-torque (filled rectangular icon) |
Components (10)
| mid |
Type: FixedTranslation Description: Fixed translation of frame_b with respect to frame_a |
|
|---|---|---|
| mounting |
Type: FixedTranslation Description: Fixed translation of frame_b with respect to frame_a |
|
| cylinderInclination |
Type: FixedRotation Description: Fixed translation followed by a fixed rotation of frame_b with respect to frame_a |
|
| crankAngle |
Type: FixedRotation Description: Fixed translation followed by a fixed rotation of frame_b with respect to frame_a |
|
| jointRRP |
Type: JointRRP Description: Planar revolute - revolute - prismatic joint aggregation (no constraints, no potential states) |
|
| connectingRod |
Type: BodyShape Description: Rigid body with mass, inertia tensor, different shapes for animation, and two frame connectors (12 potential states) |
|
| piston |
Type: BodyShape Description: Rigid body with mass, inertia tensor, different shapes for animation, and two frame connectors (12 potential states) |
|
| gasForce |
Type: GasForce2 Description: Rough approximation of gas force in a combustion engine's cylinder |
|
| crank |
Type: FixedTranslation Description: Fixed translation of frame_b with respect to frame_a |
|
| crankShape |
Type: FixedShape Description: Visualizing an elementary shape with dynamically varying shape attributes (has one frame connector) |
Used in Components (1)
|
Modelica.Mechanics.MultiBody.Examples.Loops.Utilities V6 engine with analytic loop handling |