WOLFRAM SYSTEM MODELER
GearConstraintDemonstrate usage of GearConstraint model |
|
Diagram
Wolfram Language
In[1]:=
SystemModel["Modelica.Mechanics.MultiBody.Examples.Rotational3DEffects.GearConstraint"]
Out[1]:=
Information
This information is part of the Modelica Standard Library maintained by the Modelica Association.
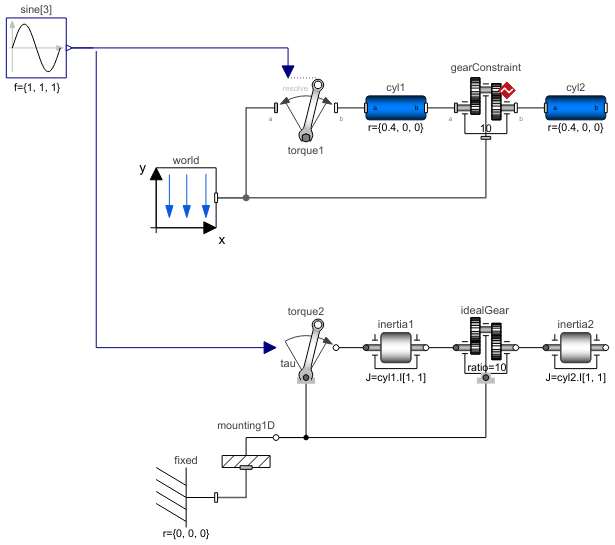
This model demonstrates the usage of the GearConstraint model to model a gearbox with multi-body elements. The formulation is compared with a one-dimensional model that is mounted with an Mounting1D element.
Components (12)
| gearConstraint |
Type: GearConstraint Description: Ideal 3-dim. gearbox (arbitrary shaft directions) |
|
|---|---|---|
| world |
Type: World Description: World coordinate system + gravity field + default animation definition |
|
| cyl1 |
Type: BodyCylinder Description: Rigid body with cylinder shape. Mass and animation properties are computed from cylinder data and density (12 potential states) |
|
| cyl2 |
Type: BodyCylinder Description: Rigid body with cylinder shape. Mass and animation properties are computed from cylinder data and density (12 potential states) |
|
| torque1 |
Type: Torque Description: Torque acting between two frames, defined by 3 input signals and resolved in frame world, frame_a, frame_b or frame_resolve |
|
| sine |
Type: Sine[3] Description: Generate sine signal |
|
| fixed |
Type: Fixed Description: Frame fixed in the world frame at a given position |
|
| inertia1 |
Type: Inertia Description: 1D-rotational component with inertia |
|
| idealGear |
Type: IdealGear Description: Ideal gear without inertia |
|
| inertia2 |
Type: Inertia Description: 1D-rotational component with inertia |
|
| torque2 |
Type: Torque Description: Input signal acting as external torque on a flange |
|
| mounting1D |
Type: Mounting1D Description: Propagate 1-dim. support torque to 3-dim. system (provided world.driveTrainMechanics3D=true) |